
Lidar is a surveying method that measures distance to a target by illuminating the target with laser light and measuring the reflected light with a sensor. Differences in laser return times and wavelengths can then be used to make digital 3-D representations of the target. The name lidar, now used as an acronym of light detection and ranging, was originally a portmanteau of light and radar. Lidar sometimes is called 3D laser scanning, a special combination of a 3D scanning and laser scanning. It has terrestrial, airborne, and mobile applications.
An autonomous robot is a robot that performs behaviors or tasks with a high degree of autonomy. Autonomous robotics is usually considered to be a subfield of artificial intelligence, robotics, and information engineering. Early versions were proposed and demonstrated by author/inventor David L. Heiserman.

Military robots are autonomous robots or remote-controlled mobile robots designed for military applications, from transport to search & rescue and attack.

Telerobotics is the area of robotics concerned with the control of semi-autonomous robots from a distance, chiefly using Wireless network or tethered connections. It is a combination of two major subfields, teleoperation and telepresence.

An unmanned ground vehicle (UGV) is a vehicle that operates while in contact with the ground and without an onboard human presence. UGVs can be used for many applications where it may be inconvenient, dangerous, or impossible to have a human operator present. Generally, the vehicle will have a set of sensors to observe the environment, and will either autonomously make decisions about its behavior or pass the information to a human operator at a different location who will control the vehicle through teleoperation.
A sentry gun is a weapon that is automatically aimed and fired at targets that are detected by sensors. The earliest functioning military sentry guns were the close-in weapon systems point-defense weapons, such as the Phalanx CIWS, used for detecting and destroying short range incoming missiles and enemy aircraft, first used exclusively on naval assets, and now also as land-based defenses.

A mobile robot is a robot that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering.
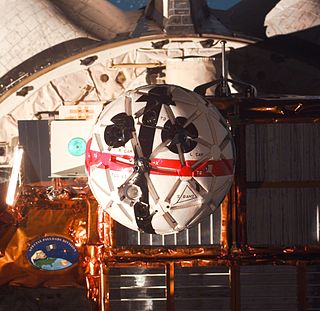
The Autonomous Extravehicular Activity Robotic Camera Sprint is a NASA experiment to demonstrate the use of a prototype free-flying television camera. It was tested on STS-87 and could also be used for remote inspections of the exterior of the International Space Station.
Squad Mission Support System is an unmanned all terrain wheeled vehicle developed by Lockheed Martin.
Radar MASINT is a subdiscipline of measurement and signature intelligence (MASINT) and refers to intelligence gathering activities that bring together disparate elements that do not fit within the definitions of signals intelligence (SIGINT), imagery intelligence (IMINT), or human intelligence (HUMINT).
A flame detector is a sensor designed to detect and respond to the presence of a flame or fire, allowing flame detection. Responses to a detected flame depend on the installation, but can include sounding an alarm, deactivating a fuel line, and activating a fire suppression system. When used in applications such as industrial furnaces, their role is to provide confirmation that the furnace is working properly; in these cases they take no direct action beyond notifying the operator or control system. A flame detector can often respond faster and more accurately than a smoke or heat detector due to the mechanisms it uses to detect the flame.
Sarcos is an American developer of robotics and microelectromechanical systems and related technologies. It was founded in the early 1980s when it was spun out from the University of Utah. The company specializes in creating robotic devices for military and public safety applications. Sarcos' work can be found in a wide variety of applications, ranging from the robotic pirates and dinosaurs at theme parks, to the robotic fountains in front of the Bellagio Hotel in Las Vegas, to NASA space suit testing equipment, prosthetic limbs, and MEMS sensors. Time Magazine named Sarcos’ Iron Man-like exoskeleton robot one of “The 50 Best Inventions of 2010”.
The SGR-A1 is a type of sentry gun that was jointly developed by Samsung Techwin and Korea University to assist South Korean troops in the Korean Demilitarized Zone. It is widely considered as the first unit of its kind to have an integrated system that includes surveillance, tracking, firing, and voice recognition. While units of the SGR-A1 have been reportedly deployed, their number is unknown due to the project being "highly classified".

Nova 5 is an autonomous robot designed for intelligent search and rescue applications created by two electronics engineers and brothers Fady and Sami Khaled. Unlike remote-controlled robots, Nova 5 uses artificial intelligence to interpret its surroundings, process the information and then navigate independently. It operates via a built-in fuzzy neural network which mimics the function of the human brain’s neurons.

Guardium, developed by G-NIUS, is an Israeli unmanned ground vehicle (UGV) used to combat and guard against invaders along Gaza's border. It was jointly developed by Israel Aerospace Industries and Elbit Industries. It can be used in either tele-operated or autonomous mode. Both modes do not require human interaction. The more unmanned ground vehicles patrolling the area the less human resources needed while guaranteeing deterrence. The joint program was terminated in April 2016, but the vehicle has remained in service with the Israel Defense Forces.

LAURON is a six-legged walking robot, which is being developed at the Forschungszentrum Informatik Karlsruhe (FZI) in Germany. The mechanics and the movements of the robot are biologically-inspired, mimicking the stick insect Carausius Morosus. The development of the LAURON walking robot started with basic research in field of six-legged locomotion in the early 1990s and led to the first robot, called LAURON. In the year 1994, this robot was presented to public at the CeBIT in Hanover. This first LAURON generation was, in contrast to the current generation, controlled by an artificial neural network, hence the robot's German name: LAUfROboter Neuronal gesteuert. The current generation LARUON V was finished in 2013.
Automated mining involves the removal of human labor from the mining process. The mining industry is in the transition towards automation. It can still require a large amount of human capital, particularly in the developing world where labor costs are low so there is less incentive for increasing efficiency. There are two types of automated mining- process and software automation, and the application of robotic technology to mining vehicles and equipment.

The National Robotics Engineering Center (NREC) is an operating unit within the Robotics Institute (RI) of Carnegie Mellon University. NREC works closely with government and industry clients to apply robotic technologies to real-world processes and products, including unmanned vehicle and platform design, autonomy, sensing and image processing, machine learning, manipulation, and human–robot interaction.

Murata Boy and Murata Girl are two self-balancing robots developed by Murata Manufacturing, a Japanese electronic components company. The company developed the robots to showcase a range of their products and generate publicity. The robots are designed to be as energy-efficient as possible, both in their basic technological components and through features like automatic sleep mode.
Air-Cobot is a French research and development project of a wheeled collaborative mobile robot able to inspect aircraft during maintenance operations. This multi-partner project involves research laboratories and industry. Research around this prototype was developed in three domains: autonomous navigation, human-robot collaboration and nondestructive testing.