In mathematics, any vector space has a corresponding dual vector space consisting of all linear forms on together with the vector space structure of pointwise addition and scalar multiplication by constants.
In mathematics, and more specifically in linear algebra, a linear map is a mapping between two vector spaces that preserves the operations of vector addition and scalar multiplication. The same names and the same definition are also used for the more general case of modules over a ring; see Module homomorphism.

In mathematics, and more specifically in linear algebra, a linear subspace or vector subspace is a vector space that is a subset of some larger vector space. A linear subspace is usually simply called a subspace when the context serves to distinguish it from other types of subspaces.
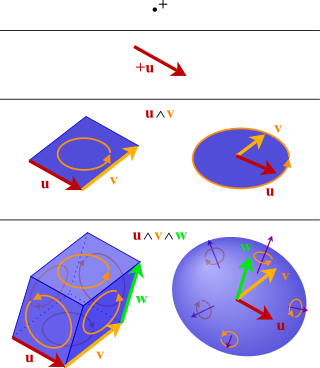
In mathematics, the exterior algebra or Grassmann algebra of a vector space is an associative algebra that contains which has a product, called exterior product or wedge product and denoted with , such that for every vector in The exterior algebra is named after Hermann Grassmann, and the names of the product come from the "wedge" symbol and the fact that the product of two elements of are "outside"
The cokernel of a linear mapping of vector spaces f : X → Y is the quotient space Y / im(f) of the codomain of f by the image of f. The dimension of the cokernel is called the corank of f.
In mathematics, a generalized flag variety is a homogeneous space whose points are flags in a finite-dimensional vector space V over a field F. When F is the real or complex numbers, a generalized flag variety is a smooth or complex manifold, called a real or complexflag manifold. Flag varieties are naturally projective varieties.

In mathematics the spin group, denoted Spin(n), is a Lie group whose underlying manifold is the double cover of the special orthogonal group SO(n) = SO(n, R), such that there exists a short exact sequence of Lie groups (when n ≠ 2)
In mathematics, a bilinear form is a bilinear map V × V → K on a vector space V over a field K. In other words, a bilinear form is a function B : V × V → K that is linear in each argument separately:

In mathematics, contact geometry is the study of a geometric structure on smooth manifolds given by a hyperplane distribution in the tangent bundle satisfying a condition called 'complete non-integrability'. Equivalently, such a distribution may be given as the kernel of a differential one-form, and the non-integrability condition translates into a maximal non-degeneracy condition on the form. These conditions are opposite to two equivalent conditions for 'complete integrability' of a hyperplane distribution, i.e. that it be tangent to a codimension one foliation on the manifold, whose equivalence is the content of the Frobenius theorem.
In mathematics, a Cohen–Macaulay ring is a commutative ring with some of the algebro-geometric properties of a smooth variety, such as local equidimensionality. Under mild assumptions, a local ring is Cohen–Macaulay exactly when it is a finitely generated free module over a regular local subring. Cohen–Macaulay rings play a central role in commutative algebra: they form a very broad class, and yet they are well understood in many ways.
This is a glossary of terms specific to differential geometry and differential topology. The following three glossaries are closely related:
In mathematics, codimension is a basic geometric idea that applies to subspaces in vector spaces, to submanifolds in manifolds, and suitable subsets of algebraic varieties.
In linear algebra, the quotient of a vector space by a subspace is a vector space obtained by "collapsing" to zero. The space obtained is called a quotient space and is denoted .
In mathematics, the kernel of a linear map, also known as the null space or nullspace, is the part of the domain which the map maps to the zero vector. That is, given a linear map L : V → W between two vector spaces V and W, the kernel of L is the vector space of all elements v of V such that L(v) = 0, where 0 denotes the zero vector in W, or more symbolically:
In mathematics, a reductive group is a type of linear algebraic group over a field. One definition is that a connected linear algebraic group G over a perfect field is reductive if it has a representation that has a finite kernel and is a direct sum of irreducible representations. Reductive groups include some of the most important groups in mathematics, such as the general linear group GL(n) of invertible matrices, the special orthogonal group SO(n), and the symplectic group Sp(2n). Simple algebraic groups and (more generally) semisimple algebraic groups are reductive.
In algebraic geometry, the Chow groups of an algebraic variety over any field are algebro-geometric analogs of the homology of a topological space. The elements of the Chow group are formed out of subvarieties in a similar way to how simplicial or cellular homology groups are formed out of subcomplexes. When the variety is smooth, the Chow groups can be interpreted as cohomology groups and have a multiplication called the intersection product. The Chow groups carry rich information about an algebraic variety, and they are correspondingly hard to compute in general.
In mathematics, an algebraic cycle on an algebraic variety V is a formal linear combination of subvarieties of V. These are the part of the algebraic topology of V that is directly accessible by algebraic methods. Understanding the algebraic cycles on a variety can give profound insights into the structure of the variety.
This is a glossary of algebraic geometry.
This is a glossary of commutative algebra.
In algebraic geometry, the dimension of a scheme is a generalization of a dimension of an algebraic variety. Scheme theory emphasizes the relative point of view and, accordingly, the relative dimension of a morphism of schemes is also important.


