Ultrasound is sound with frequencies greater than 20 kilohertz. This frequency is the approximate upper audible limit of human hearing in healthy young adults. The physical principles of acoustic waves apply to any frequency range, including ultrasound. Ultrasonic devices operate with frequencies from 20 kHz up to several gigahertz.

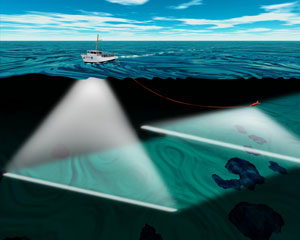
Echo sounding or depth sounding is the use of sonar for ranging, normally to determine the depth of water (bathymetry). It involves transmitting acoustic waves into water and recording the time interval between emission and return of a pulse; the resulting time of flight, along with knowledge of the speed of sound in water, allows determining the distance between sonar and target. This information is then typically used for navigation purposes or in order to obtain depths for charting purposes.
Flow measurement is the quantification of bulk fluid movement. Flow can be measured using devices called flowmeters in various ways. The common types of flowmeters with industrial applications are listed below:
Diving physics, or the physics of underwater diving, is the basic aspects of physics which describe the effects of the underwater environment on the underwater diver and their equipment, and the effects of blending, compressing, and storing breathing gas mixtures, and supplying them for use at ambient pressure. These effects are mostly consequences of immersion in water, the hydrostatic pressure of depth and the effects of pressure and temperature on breathing gases. An understanding of the physics behind is useful when considering the physiological effects of diving, breathing gas planning and management, diver buoyancy control and trim, and the hazards and risks of diving.
An oxygen sensor (or lambda sensor, where lambda refers to air–fuel equivalence ratio, usually denoted by λ) or probe or sond, is an electronic device that measures the proportion of oxygen (O2) in the gas or liquid being analyzed.

An autonomous underwater vehicle (AUV) is a robot that travels underwater without requiring continuous input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) – controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications an AUV is more often referred to as an unmanned undersea vehicle (UUV). Underwater gliders are a subclass of AUVs.

The manifold absolute pressure sensor is one of the sensors used in an internal combustion engine's electronic control system.

An underwater glider is a type of autonomous underwater vehicle (AUV) that employs variable-buoyancy propulsion instead of traditional propellers or thrusters. It employs variable buoyancy in a similar way to a profiling float, but unlike a float, which can move only up and down, an underwater glider is fitted with hydrofoils that allow it to glide forward while descending through the water. At a certain depth, the glider switches to positive buoyancy to climb back up and forward, and the cycle is then repeated.
An acoustic doppler current profiler (ADCP) is a hydroacoustic current meter similar to a sonar, used to measure water current velocities over a depth range using the Doppler effect of sound waves scattered back from particles within the water column. The term ADCP is a generic term for all acoustic current profilers, although the abbreviation originates from an instrument series introduced by RD Instruments in the 1980s. The working frequencies range of ADCPs range from 38 kHz to several megahertz.

Unmanned underwater vehicles (UUV), also known as uncrewed underwater vehicles and underwater drones, are submersible vehicles that can operate underwater without a human occupant. These vehicles may be divided into two categories: remotely operated underwater vehicles (ROUVs) and autonomous underwater vehicles (AUVs). ROUVs are remotely controlled by a human operator. AUVs are automated and operate independently of direct human input.

Underwater acoustics is the study of the propagation of sound in water and the interaction of the mechanical waves that constitute sound with the water, its contents and its boundaries. The water may be in the ocean, a lake, a river or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly.
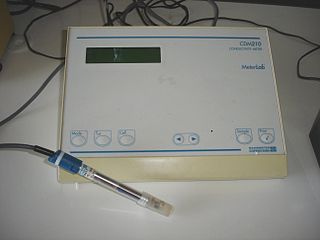
An electrical conductivity meter measures the electrical conductivity in a solution. It has multiple applications in research and engineering, with common usage in hydroponics, aquaculture, aquaponics, and freshwater systems to monitor the amount of nutrients, salts or impurities in the water.

Underwater acoustic communication is a technique of sending and receiving messages in water. There are several ways of employing such communication but the most common is by using hydrophones. Underwater communication is difficult due to factors such as multi-path propagation, time variations of the channel, small available bandwidth and strong signal attenuation, especially over long ranges. Compared to terrestrial communication, underwater communication has low data rates because it uses acoustic waves instead of electromagnetic waves.
SPURV, or Self-Propelled Underwater Research Vehicle, was an Autonomous Underwater Vehicle built in 1957 at the University of Washington's Applied Physics Laboratory. The research and development of this vehicle was funded by the United States Office of Naval Research (ONR), and it became the US Navy’s first autonomous underwater vehicle (AUV). The navy used a total of 7 SPURV vehicles until 1979.

Conductivity or specific conductance of an electrolyte solution is a measure of its ability to conduct electricity. The SI unit of conductivity is siemens per meter (S/m).

CTD stands for conductivity, temperature, and depth. A CTD instrument is an oceanography sonde used to measure the electrical conductivity, temperature, and pressure of seawater. The pressure is closely related to depth. Conductivity is used to determine salinity.

The Sentry is an autonomous underwater vehicle (AUV) made by the Woods Hole Oceanographic Institution. Sentry is designed to descend to depths of 6,000 metres (20,000 ft) and to carry a range of devices for taking samples, pictures and readings from the deep sea.
The Tropical Atmosphere Ocean (TAO) project is a major international effort that instrumented the entire tropical Pacific Ocean, with approximately 70 deep ocean moorings. The development of the TAO array in 1985 was motivated by the 1982-1983 El Niño event and ultimately designed for the study of year-to-year climate variations related to El Niño and the Southern Oscillation (ENSO). Led by the TAO Project Office of the Pacific Marine Environmental Laboratory (PMEL), the full array of 70 moorings was completed in 1994.

The Garfield Thomas Water Tunnel is one of the U.S. Navy's principal experimental hydrodynamic research facilities and is operated by the Penn State Applied Research Laboratory. The facility was completed and entered operation in 1949. The facility is named after Lieutenant W. Garfield Thomas Jr., a Penn State journalism graduate who was killed in World War II. For a long time, the Garfield Thomas Water Tunnel was the largest circulating water tunnel in the world. It has been declared a historic mechanical engineering landmark by the American Society of Mechanical Engineers.
An underwater survey is a survey performed in an underwater environment or conducted remotely on an underwater object or region. Survey can have several meanings. The word originates in Medieval Latin with meanings of looking over and detailed study of a subject. One meaning is the accurate measurement of a geographical region, usually with the intention of plotting the positions of features as a scale map of the region. This meaning is often used in scientific contexts, and also in civil engineering and mineral extraction. Another meaning, often used in a civil, structural, or marine engineering context, is the inspection of a structure or vessel to compare actual condition with the specified nominal condition, usually with the purpose of reporting on the actual condition and compliance with, or deviations from, the nominal condition, for quality control, damage assessment, valuation, insurance, maintenance, and similar purposes. In other contexts it can mean inspection of a region to establish presence and distribution of specified content, such as living organisms, either to establish a baseline, or to compare with a baseline.