
An emergency position-indicating radiobeacon station is a distress radiobeacon, a tracking transmitter that is triggered during an accident. These are detected by satellites. The system is monitored by an international consortium of rescue services, COSPAS-SARSAT. The basic purpose of this system is to help rescuers find survivors within the so-called "golden day" during which the majority of survivors can usually be saved.

A buoy is a floating device that can have many purposes. It can be anchored (stationary) or allowed to drift with ocean currents. The word, derived from the word buoyant, of Old French or Middle Dutch origin, is in British English most commonly pronounced. In American English the pronunciation is closer to "boo-ee."

A weather station is a facility, either on land or sea, with instruments and equipment for measuring atmospheric conditions to provide information for weather forecasts and to study the weather and climate. The measurements taken include temperature, atmospheric pressure, humidity, wind speed, wind direction, and precipitation amounts. Wind measurements are taken with as few other obstructions as possible, while temperature and humidity measurements are kept free from direct solar radiation, or insolation. Manual observations are taken at least once daily, while automated measurements are taken at least once an hour. Weather conditions out at sea are taken by ships and buoys, which measure slightly different meteorological quantities such as sea surface temperature (SST), wave height, and wave period. Drifting weather buoys outnumber their moored versions by a significant amount.

A sonobuoy is a relatively small buoy expendable sonar system that is dropped/ejected from aircraft or ships conducting anti-submarine warfare or underwater acoustic research.

The automatic identification system (AIS) is an automatic tracking system that uses transponders on ships and is used by vessel traffic services (VTS). When satellites are used to detect AIS signatures, the term Satellite-AIS (S-AIS) is used. AIS information supplements marine radar, which continues to be the primary method of collision avoidance for water transport.
An acoustic Doppler current profiler (ADCP) is a hydroacoustic current meter similar to a sonar, used to measure water current velocities over a depth range using the Doppler effect of sound waves scattered back from particles within the water column. The term ADCP is a generic term for all acoustic current profilers, although the abbreviation originates from an instrument series introduced by RD Instruments in the 1980s. The working frequencies range of ADCPs range from 38 kHz to several Megahertz. The device used in the air for wind speed profiling using sound is known as SODAR and works with the same underlying principles.

The International Cospas-Sarsat Programme is a satellite-aided search and rescue initiative. It is organized as a treaty-based, nonprofit, intergovernmental, humanitarian cooperative of 45 nations and agencies. It is dedicated to detecting and locating radio beacons activated by persons, aircraft or vessels in distress, and forwarding this alert information to authorities that can take action for rescue.

The National Data Buoy Center (NDBC) is a part of the National Oceanic and Atmospheric Administration's (NOAA) National Weather Service (NWS). NDBC designs, develops, operates, and maintains a network of data collecting buoys and coastal stations. The NBDC is located in southern Mississippi as a tenant at the John C. Stennis Space Center, a National Aeronautics and Space Administration (NASA) facility.
Leeway is the amount of drift motion to leeward of an object floating in the water caused by the component of the wind vector that is perpendicular to the object’s forward motion. The National Search and Rescue Supplement to the International Aeronautical and Maritime Search and Rescue Manual defines leeway as "the movement of a search object through water caused by winds blowing against exposed surfaces". However, the resultant total motion of an object is made up of the leeway drift and the movement of the upper layer of the ocean caused by the surface currents, tidal currents and ocean currents. Objects with a greater exposure to each element will experience more leeway drift and overall movement through the water than ones with less exposure.
The World Ocean Circulation Experiment (WOCE) was a component of the international World Climate Research Program, and aimed to establish the role of the World Ocean in the Earth's climate system. WOCE's field phase ran between 1990 and 1998, and was followed by an analysis and modeling phase that ran until 2002. When the WOCE was conceived, there were three main motivations for its creation. The first of these is the inadequate coverage of the World Ocean, specifically in the Southern Hemisphere. Data was also much more sparse during the winter months than the summer months, and there was—and still to some extent—a critical need for data covering all seasons. Secondly, the data that did exist was not initially collected for studying ocean circulation and was not well suited for model comparison. Lastly, there were concerns involving the accuracy and reliability of some measurements. The WOCE was meant to address these problems by providing new data collected in ways designed to “meet the needs of global circulation models for climate prediction.”

Weather buoys are instruments which collect weather and ocean data within the world's oceans, as well as aid during emergency response to chemical spills, legal proceedings, and engineering design. Moored buoys have been in use since 1951, while drifting buoys have been used since 1979. Moored buoys are connected with the ocean bottom using either chains, nylon, or buoyant polypropylene. With the decline of the weather ship, they have taken a more primary role in measuring conditions over the open seas since the 1970s. During the 1980s and 1990s, a network of buoys in the central and eastern tropical Pacific Ocean helped study the El Niño-Southern Oscillation. Moored weather buoys range from 1.5–12 metres (5–40 ft) in diameter, while drifting buoys are smaller, with diameters of 30–40 centimetres (12–16 in). Drifting buoys are the dominant form of weather buoy in sheer number, with 1250 located worldwide. Wind data from buoys has smaller error than that from ships. There are differences in the values of sea surface temperature measurements between the two platforms as well, relating to the depth of the measurement and whether or not the water is heated by the ship which measures the quantity.
A mooring in oceanography is a collection of devices, connected to a wire and anchored on the sea floor. It is the Eulerian way of measuring ocean currents, since a mooring is stationary at a fixed location. In contrast to that, the Lagrangian way measures the motion of an oceanographic drifter, see Lagrangian drifter.

USCGC Juniper (WLB-201) is the lead ship of the U.S. Coast Guard's seagoing buoy tenders. She is outfitted with some of the most advanced technological and navigational capabilities currently available.

Coastal ocean dynamics applications radar (CODAR) describes a type of portable, land-based, High Frequency (HF) radar developed between 1973 and 1983 at NOAA's Wave Propagation Laboratory in Boulder, Colorado. CODAR is a noninvasive system that permits to measure and map near-surface ocean currents in coastal waters. It is transportable and offers output ocean current maps on site in near real time. Moreover, using CODAR it is possible to measure waves heights and it provides an indirect estimate of local wind direction.

A drifter is an oceanographic device floating on the surface to investigate ocean currents and other parameters like temperature or salinity. Modern drifters are typically tracked by satellite, often GPS. They are sometimes called Lagrangian drifters since the location of the measurements they make moves with the flow. A major user of drifters is the Global Drifter Program.
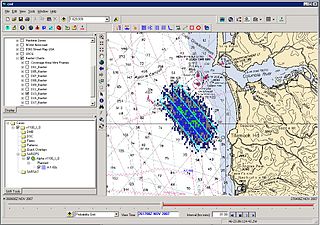
Search and Rescue Optimal Planning System (SAROPS) is a comprehensive search and rescue (SAR) planning system used by the United States Coast Guard in the planning and execution of almost all SAR cases in and around the United States and the Caribbean. SAROPS has three main components: The Graphical User Interface (GUI), the Environmental Data Server (EDS) and the Simulator (SIM). Using the Commercial Joint Mapping Tool Kit's (C/JMTK) government licensing of the Geographic Information System (GIS) SAROPS can be used in both a coastal and oceanic environment. Built into the simulator is the ability to access global and regional wind and current data sets making SAROPS the most comprehensive and powerful tool available for maritime SAR planners.
An underwater acoustic positioning system is a system for the tracking and navigation of underwater vehicles or divers by means of acoustic distance and/or direction measurements, and subsequent position triangulation. Underwater acoustic positioning systems are commonly used in a wide variety of underwater work, including oil and gas exploration, ocean sciences, salvage operations, marine archaeology, law enforcement and military activities.

The Global Drifter Program (GDP), was conceived by Prof. Peter Niiler, with the objective of collecting measurements of surface ocean currents, sea surface temperature and sea-level atmospheric pressure using drifters. It is the principal component of the Global Surface Drifting Buoy Array, a branch of NOAA's Global Ocean Observing System (GOOS) and a scientific project of the Data Buoy Cooperation Panel (DBCP). The project originated in February 1979 as part of the TOGA/Equatorial Pacific Ocean Circulation Experiment (EPOCS) and the first large-scale deployment of drifters was in 1988 with the goal of mapping the tropical Pacific Ocean's surface circulation. The current goal of the project is to use 1250 satellite-tracked surface drifting buoys to make accurate and globally dense in-situ observations of mixed layer currents, sea surface temperature, atmospheric pressure, winds and salinity, and to create a system to process the data. Horizontal transports in the oceanic mixed layer measured by the GDP are relevant to biological and chemical processes as well as physical ones.
An ocean data acquisition system (ODAS) is a set of instruments deployed at sea to collect as much meteorological and oceanographic data as possible. With their sensors, these systems deliver data both on the state of the ocean itself and the surrounding lower atmosphere. The use of microelectronics and technologies with efficient energy consumption allows to increase the types and numbers of sensor deployed on a single device.
