
A finger is a limb of the body and a type of digit, an organ of manipulation and sensation found in the hands of most of the Tetrapods, so also with humans and other primates. Most land vertebrates have five fingers (Pentadactyly).

The thumb is the first digit of the hand, next to the index finger. When a person is standing in the medical anatomical position, the thumb is the outermost digit. The Medical Latin English noun for thumb is pollex, and the corresponding adjective for thumb is pollical.

Toes are the digits (fingers) of the foot of a tetrapod. Animal species such as cats that walk on their toes are described as being digitigrade. Humans, and other animals that walk on the soles of their feet, are described as being plantigrade; unguligrade animals are those that walk on hooves at the tips of their toes.

In human anatomy, the wrist is variously defined as (1) the carpus or carpal bones, the complex of eight bones forming the proximal skeletal segment of the hand; (2) the wrist joint or radiocarpal joint, the joint between the radius and the carpus and; (3) the anatomical region surrounding the carpus including the distal parts of the bones of the forearm and the proximal parts of the metacarpus or five metacarpal bones and the series of joints between these bones, thus referred to as wrist joints. This region also includes the carpal tunnel, the anatomical snuff box, bracelet lines, the flexor retinaculum, and the extensor retinaculum.
In human anatomy, extensor carpi radialis brevis is a muscle in the forearm that acts to extend and abduct the wrist. It is shorter and thicker than its namesake extensor carpi radialis longus which can be found above the proximal end of the extensor carpi radialis brevis.

The upper limbs or upper extremities are the forelimbs of an upright-postured tetrapod vertebrate, extending from the scapulae and clavicles down to and including the digits, including all the musculatures and ligaments involved with the shoulder, elbow, wrist and knuckle joints. In humans, each upper limb is divided into the arm, forearm and hand, and is primarily used for climbing, lifting and manipulating objects.

The phalanges are digital bones in the hands and feet of most vertebrates. In primates, the thumbs and big toes have two phalanges while the other digits have three phalanges. The phalanges are classed as long bones.

The extensor digitorum muscle is a muscle of the posterior forearm present in humans and other animals. It extends the medial four digits of the hand. Extensor digitorum is innervated by the posterior interosseous nerve, which is a branch of the radial nerve.
In human anatomy, the extensor pollicis longus muscle (EPL) is a skeletal muscle located dorsally on the forearm. It is much larger than the extensor pollicis brevis, the origin of which it partly covers and acts to stretch the thumb together with this muscle.
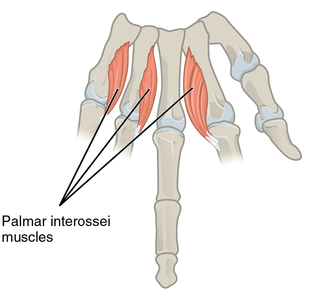
In human anatomy, the palmar or volar interossei are three small, unipennate muscles in the hand that lie between the metacarpal bones and are attached to the index, ring, and little fingers. They are smaller than the dorsal interossei of the hand.

In human anatomy, the dorsal interossei (DI) are four muscles in the back of the hand that act to abduct (spread) the index, middle, and ring fingers away from hand's midline and assist in flexion at the metacarpophalangeal joints and extension at the interphalangeal joints of the index, middle and ring fingers.

In human anatomy, the abductor digiti minimi is a skeletal muscle situated on the ulnar border of the palm of the hand. It forms the ulnar border of the palm and its spindle-like shape defines the hypothenar eminence of the palm together with the skin, connective tissue, and fat surrounding it. Its main function is to pull the little finger away from the other fingers.

The interphalangeal joints of the hand are the hinge joints between the phalanges of the fingers that provide flexion towards the palm of the hand.

iCub is a 1 metre tall open source robotics humanoid robot testbed for research into human cognition and artificial intelligence.

An extensor expansion is the special connective attachments by which the extensor tendons insert into the phalanges.

In the human hand, palmar or volar plates are found in the metacarpophalangeal (MCP) and interphalangeal (IP) joints, where they reinforce the joint capsules, enhance joint stability, and limit hyperextension. The plates of the MCP and IP joints are structurally and functionally similar, except that in the MCP joints they are interconnected by a deep transverse ligament. In the MCP joints, they also indirectly provide stability to the longitudinal palmar arches of the hand. The volar plate of the thumb MCP joint has a transverse longitudinal rectangular shape, shorter than those in the fingers.

The muscles of the hand are the skeletal muscles responsible for the movement of the hand and fingers. The muscles of the hand can be subdivided into two groups: the extrinsic and intrinsic muscle groups. The extrinsic muscle groups are the long flexors and extensors. They are called extrinsic because the muscle belly is located on the forearm. The intrinsic group are the smaller muscles located within the hand itself. The muscles of the hand are innervated by the radial, median, and ulnar nerves from the brachial plexus.

A hand is a prehensile, multi-fingered appendage located at the end of the forearm or forelimb of primates such as humans, chimpanzees, monkeys, and lemurs. A few other vertebrates such as the koala are often described as having "hands" instead of paws on their front limbs. The raccoon is usually described as having "hands" though opposable thumbs are lacking.

The extrinsic extensor muscles of the hand are located in the back of the forearm and have long tendons connecting them to bones in the hand, where they exert their action. Extrinsic denotes their location outside the hand. Extensor denotes their action which is to extend, or open flat, joints in the hand. They include the extensor carpi radialis longus (ECRL), extensor carpi radialis brevis (ECRB), extensor digitorum (ED), extensor digiti minimi (EDM), extensor carpi ulnaris (ECU), abductor pollicis longus (APL), extensor pollicis brevis (EPB), extensor pollicis longus (EPL), and extensor indicis (EI).

The muscles of the thumb are nine skeletal muscles located in the hand and forearm. The muscles allow for flexion, extension, adduction, abduction and opposition of the thumb. The muscles acting on the thumb can be divided into two groups: The extrinsic hand muscles, with their muscle bellies located in the forearm, and the intrinsic hand muscles, with their muscles bellies located in the hand proper.

