Related Research Articles

In geometry, the convex hull or convex envelope or convex closure of a shape is the smallest convex set that contains it. The convex hull may be defined either as the intersection of all convex sets containing a given subset of a Euclidean space, or equivalently as the set of all convex combinations of points in the subset. For a bounded subset of the plane, the convex hull may be visualized as the shape enclosed by a rubber band stretched around the subset.
In computational geometry, polygon triangulation is the decomposition of a polygonal area P into a set of triangles, i.e., finding a set of triangles with pairwise non-intersecting interiors whose union is P.
The art gallery problem or museum problem is a well-studied visibility problem in computational geometry. It originates from a real-world problem of guarding an art gallery with the minimum number of guards who together can observe the whole gallery. In the geometric version of the problem, the layout of the art gallery is represented by a simple polygon and each guard is represented by a point in the polygon. A set of points is said to guard a polygon if, for every point in the polygon, there is some such that the line segment between and does not leave the polygon.

In mathematics, a bitangent to a curve C is a line L that touches C in two distinct points P and Q and that has the same direction as C at these points. That is, L is a tangent line at P and at Q.
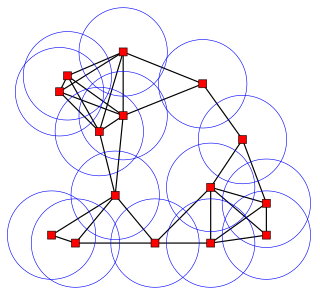
In geometric graph theory, a unit disk graph is the intersection graph of a family of unit disks in the Euclidean plane. That is, it is a graph with one vertex for each disk in the family, and with an edge between two vertices whenever the corresponding vertices lie within a unit distance of each other.

The Euclidean shortest path problem is a problem in computational geometry: given a set of polyhedral obstacles in a Euclidean space, and two points, find the shortest path between the points that does not intersect any of the obstacles.

In computational geometry, the visibility polygon or visibility region for a point p in the plane among obstacles is the possibly unbounded polygonal region of all points of the plane visible from p. The visibility polygon can also be defined for visibility from a segment, or a polygon. Visibility polygons are useful in robotics, video games, and in determining positions to locate facilities, such as the best placement of security guards in an art gallery.

In geometry, a polygon P in the plane is called monotone with respect to a straight line L, if every line orthogonal to L intersects P at most twice.
In graph theory and theoretical computer science, the longest path problem is the problem of finding a simple path of maximum length in a given graph. A path is called simple if it does not have any repeated vertices; the length of a path may either be measured by its number of edges, or by the sum of the weights of its edges. In contrast to the shortest path problem, which can be solved in polynomial time in graphs without negative-weight cycles, the longest path problem is NP-hard and the decision version of the problem, which asks whether a path exists of at least some given length, is NP-complete. This means that the decision problem cannot be solved in polynomial time for arbitrary graphs unless P = NP. Stronger hardness results are also known showing that it is difficult to approximate. However, it has a linear time solution for directed acyclic graphs, which has important applications in finding the critical path in scheduling problems.
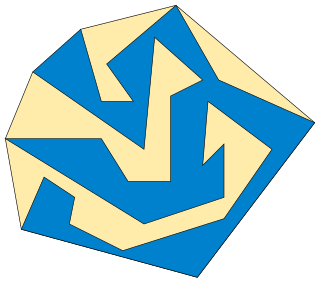
In computational geometry, the potato peeling or convex skull problem is a problem of finding the convex polygon of the largest possible area that lies within a given non-convex polygon. It was posed independently by Goodman and Woo, and solved in polynomial time by Chang and Yap. The exponent of the polynomial time bound is high, but the same problem can also be accurately approximated in near-linear time.
In computational geometry and computer science, the minimum-weight triangulation problem is the problem of finding a triangulation of minimal total edge length. That is, an input polygon or the convex hull of an input point set must be subdivided into triangles that meet edge-to-edge and vertex-to-vertex, in such a way as to minimize the sum of the perimeters of the triangles. The problem is NP-hard for point set inputs, but may be approximated to any desired degree of accuracy. For polygon inputs, it may be solved exactly in polynomial time. The minimum weight triangulation has also sometimes been called the optimal triangulation.
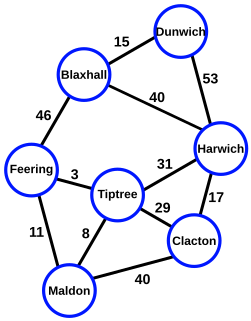
In graph algorithms, the widest path problem is the problem of finding a path between two designated vertices in a weighted graph, maximizing the weight of the minimum-weight edge in the path. The widest path problem is also known as the bottleneck shortest path problem or the maximum capacity path problem. It is possible to adapt most shortest path algorithms to compute widest paths, by modifying them to use the bottleneck distance instead of path length. However, in many cases even faster algorithms are possible.
John E. Hershberger is an American computer scientist and software professional, a principal engineer at Mentor Graphics Corporation since 1993. He is known for his research in computational geometry and algorithm engineering.
In discrete and computational geometry, a set of points in the Euclidean plane is said to be in convex position or convex independent if none of the points can be represented as a convex combination of the others. A finite set of points is in convex position if all of the points are vertices of their convex hull. More generally, a family of convex sets is said to be in convex position if they are pairwise disjoint and none of them is contained in the convex hull of the others.
Anna Lubiw is a computer scientist known for her work in computational geometry and graph theory. She is currently a professor at the University of Waterloo.

In computational geometry, the opaque forest problem can be stated as follows: "Given a convex polygon C in the plane, determine the minimal forest T of closed, bounded line segments such that every line through C also intersects T". T is said to be the opaque forest, or barrier of C. C is said to be the coverage of T. While any forest that covers C is a barrier of C, we wish to find the one with shortest length.
In graph theory, a branch of mathematics, an indifference graph is an undirected graph constructed by assigning a real number to each vertex and connecting two vertices by an edge when their numbers are within one unit of each other. Indifference graphs are also the intersection graphs of sets of unit intervals, or of properly nested intervals. Based on these two types of interval representations, these graphs are also called unit interval graphs or proper interval graphs; they form a subclass of the interval graphs.
A partition of a polygon is a set of primitive units, which do not overlap and whose union equals the polygon. A polygon partition problem is a problem of finding a partition which is minimal in some sense, for example a partition with a smallest number of units or with units of smallest total side-length.
In discrete geometry and computational geometry, the convex hull of a simple polygon is the polygon of minimum perimeter that contains a given simple polygon. It is a special case of the more general concept of a convex hull. It can be computed in linear time, faster than algorithms for convex hulls of point sets.
In computational geometry, the star unfolding of a convex polyhedron is a net obtained by cutting the polyhedron along geodesics through its faces. It has also been called the inward layout of the polyhedron, or the Alexandrov unfolding after Aleksandr Danilovich Aleksandrov, who first considered it.
References
- 1 2 Chin, Wei-Pang; Ntafos, Simeon (1988), "Optimum watchman routes", Information Processing Letters , 28 (1): 39–44, doi:10.1016/0020-0190(88)90141-X, MR 0947253 .
- ↑ Carlsson, S.; Jonsson, H.; Nilsson, B. J. (1999), "Finding the shortest watchman route in a simple polygon", Discrete and Computational Geometry , 22 (3): 377–402, doi: 10.1007/PL00009467 , MR 1706598 .
- ↑ Tan, Xuehou (2001), "Fast computation of shortest watchman routes in simple polygons", Information Processing Letters , 77 (1): 27–33, doi:10.1016/S0020-0190(00)00146-0, MR 1813864 .
- ↑ Mitchell, Joseph S. B. (2013), "Approximating watchman routes", Proceedings of the Twenty-Fourth Annual ACM–SIAM Symposium on Discrete Algorithms (SODA '13), SIAM, pp. 844–855, doi: 10.1137/1.9781611973105.60 , ISBN 978-1-611972-51-1 .
| This geometry-related article is a stub. You can help Wikipedia by expanding it. |