Related Research Articles

Luc Steels is a Belgian scientist and artist. Steels is considered a pioneer of Artificial Intelligence in Europe who has made contributions to expert systems, behavior-based robotics, artificial life and evolutionary computational linguistics. He was a fellow of the Catalan Institution for Research and Advanced Studies ICREA associated as a research professor with the Institute for Evolutionary Biology (UPF/CSIC) in Barcelona. He was formerly founding Director of the Artificial Intelligence Laboratory of the Vrije Universiteit Brussel and founding director of the Sony Computer Science Laboratory in Paris. Steels has also been active in the arts collaborating with visual artists and theater makers and composing music for opera.

Boids is an artificial life program, developed by Craig Reynolds in 1986, which simulates the flocking behaviour of birds, and related group motion. His paper on this topic was published in 1987 in the proceedings of the ACM SIGGRAPH conference. The name "boid" corresponds to a shortened version of "bird-oid object", which refers to a bird-like object. Reynolds' boid model is one example of a larger general concept, for which many other variations have been developed since. The closely related work of Ichiro Aoki is noteworthy because it was published in 1982 — five years before Reynolds' boids paper.

A proboscis is an elongated appendage from the head of an animal, either a vertebrate or an invertebrate. In invertebrates, the term usually refers to tubular mouthparts used for feeding and sucking. In vertebrates, a proboscis is an elongated nose or snout.

Neuroethology is the evolutionary and comparative approach to the study of animal behavior and its underlying mechanistic control by the nervous system. It is an interdisciplinary science that combines both neuroscience and ethology. A central theme of neuroethology, which differentiates it from other branches of neuroscience, is its focus on behaviors that have been favored by natural selection rather than on behaviors that are specific to a particular disease state or laboratory experiment.
Swarm intelligence (SI) is the collective behavior of decentralized, self-organized systems, natural or artificial. The concept is employed in work on artificial intelligence. The expression was introduced by Gerardo Beni and Jing Wang in 1989, in the context of cellular robotic systems.

A multi-agent system is a computerized system composed of multiple interacting intelligent agents. Multi-agent systems can solve problems that are difficult or impossible for an individual agent or a monolithic system to solve. Intelligence may include methodic, functional, procedural approaches, algorithmic search or reinforcement learning.
Nanoid robotics, or for short, nanorobotics or nanobotics, is an emerging technology field creating machines or robots, which are called nanorobots or simply nanobots, whose components are at or near the scale of a nanometer. More specifically, nanorobotics refers to the nanotechnology engineering discipline of designing and building nanorobots with devices ranging in size from 0.1 to 10 micrometres and constructed of nanoscale or molecular components. The terms nanobot, nanoid, nanite, nanomachine and nanomite have also been used to describe such devices currently under research and development.

Nanobiotechnology, bionanotechnology, and nanobiology are terms that refer to the intersection of nanotechnology and biology. Given that the subject is one that has only emerged very recently, bionanotechnology and nanobiotechnology serve as blanket terms for various related technologies.
Alan H. Goldstein is a research scientist and futurist.
Humans have considered and tried to create non-biological life for at least 3000 years. As seen in tales ranging from Pygmalion to Frankenstein, humanity has long been intrigued by the concept of artificial life.
Allothetic means being centred in people or places other than oneself. It has been defined as a process of "determining and maintaining a course or trajectory from one place to another. It can be used as a navigational strategy among animals to aid in their survival. It can also be a source of information for machines, particularly those biologically-inspired models and is provided by a set of laser rangefinders, sonars, or vision.
A cultured neuronal network is a cell culture of neurons that is used as a model to study the central nervous system, especially the brain. Often, cultured neuronal networks are connected to an input/output device such as a multi-electrode array (MEA), thus allowing two-way communication between the researcher and the network. This model has proved to be an invaluable tool to scientists studying the underlying principles behind neuronal learning, memory, plasticity, connectivity, and information processing.
Neurorobotics is the combined study of neuroscience, robotics, and artificial intelligence. It is the science and technology of embodied autonomous neural systems. Neural systems include brain-inspired algorithms, computational models of biological neural networks and actual biological systems. Such neural systems can be embodied in machines with mechanic or any other forms of physical actuation. This includes robots, prosthetic or wearable systems but also, at smaller scale, micro-machines and, at the larger scales, furniture and infrastructures.

Webots is a free and open-source 3D robot simulator used in industry, education and research.
A hierarchical control system (HCS) is a form of control system in which a set of devices and governing software is arranged in a hierarchical tree. When the links in the tree are implemented by a computer network, then that hierarchical control system is also a form of networked control system.
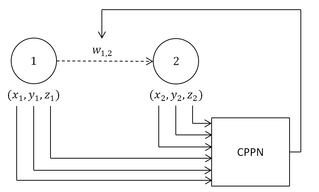
Hypercube-based NEAT, or HyperNEAT, is a generative encoding that evolves artificial neural networks (ANNs) with the principles of the widely used NeuroEvolution of Augmented Topologies (NEAT) algorithm developed by Kenneth Stanley. It is a novel technique for evolving large-scale neural networks using the geometric regularities of the task domain. It uses Compositional Pattern Producing Networks (CPPNs), which are used to generate the images for Picbreeder.orgArchived 2011-07-25 at the Wayback Machine and shapes for EndlessForms.comArchived 2018-11-14 at the Wayback Machine. HyperNEAT has recently been extended to also evolve plastic ANNs and to evolve the location of every neuron in the network.
Artificial life is a field of study wherein researchers examine systems related to natural life, its processes, and its evolution, through the use of simulations with computer models, robotics, and biochemistry. The discipline was named by Christopher Langton, an American theoretical biologist, in 1986. In 1987, Langton organized the first conference on the field, in Los Alamos, New Mexico. There are three main kinds of alife, named for their approaches: soft, from software; hard, from hardware; and wet, from biochemistry. Artificial life researchers study traditional biology by trying to recreate aspects of biological phenomena.
This glossary of nanotechnology is a list of definitions of terms and concepts relevant to nanotechnology, its sub-disciplines, and related fields.

Aude G. Billard is a Swiss physicist in the fields of machine learning and human-robot interactions. As a full professor at the School of Engineering at Swiss Federal Institute of Technology in Lausanne (EPFL), Billard’s research focuses on applying machine learning to support robot learning through human guidance. Billard’s work on human-robot interactions has been recognized numerous times by the Institute of Electrical and Electronics Engineers (IEEE) and she currently holds a leadership position on the executive committee of the IEEE Robotics and Automation Society (RAS) as the vice president of publication activities.

Gene Pool is an artificial life simulation created by Jeffrey Ventrella in 1997. It features physics-based 2D proto-swimming creatures (swimbots) that compete for mates and food.
References
- ↑ Bruyninckx, Herman; Preucil, Libor; Kulich, Miroslav (2008). European Robotics Symposium 2008. Berlin: Springer Science & Business Media. p. 23. ISBN 9783540783152.
- ↑ Fath, Brian D. (2018). Encyclopedia of Ecology, Volume I. Amsterdam: Elsevier. p. 604. ISBN 9780444637680.
- ↑ "Animo" at Verbix Latin Verb Conjugator. Retrieved July 22, 2015.
- ↑ "Animo" at Latdict Latin Dictionary and Grammar Resources. Retrieved July 22, 2015.
- 1 2 Narendra, Kumpati S. (2013). Adaptive and Learning Systems: Theory and Applications. New York: Springer Science & Business Media. p. 256. ISBN 9781475718973.
- ↑ Boden, Margaret A. (2006). Mind as Machine: A History of Cognitive Science. Oxford: Clarendon Press. pp. 227. ISBN 9780199241446.
- ↑ Doncieux, Stephane; Girard, Benoit; Guillot, Agnes; Hallam, John; Meyer, Jean-Arcady; Mouret, Jean-Baptiste (2010). From Animals to Animats 11: 11th International Conference on Simulation of Adaptive Behavior, SAB 2010, Paris - Clos Lucé, France, August 25-28, 2010. Proceedings. Berlin: Springer. p. 1. ISBN 978-3642151927.
- ↑ Tu, Xiaoyuan (2003). Artificial Animals for Computer Animation: Biomechanics, Locomotion, Perception, and Behavior. Heidelberg: Springer. p. 5. ISBN 3540669396.
- ↑ Bhaumik, Arkapravo (2018). From AI to Robotics: Mobile, Social, and Sentient Robots. Boca Raton, FL: CRC Press. p. 49. ISBN 9781482251487.