Subsumption architecture is a reactive robotic architecture heavily associated with behavior-based robotics which was very popular in the 1980s and 90s. The term was introduced by Rodney Brooks and colleagues in 1986. Subsumption has been widely influential in autonomous robotics and elsewhere in real-time AI.
Behavior-based robotics (BBR) or behavioral robotics is an approach in robotics that focuses on robots that are able to exhibit complex-appearing behaviors despite little internal variable state to model its immediate environment, mostly gradually correcting its actions via sensory-motor links.

Cynthia Breazeal is an American robotics scientist and entrepreneur. She is a former chief scientist and chief experience officer of Jibo, a company she co-founded in 2012 that developed personal assistant robots. Currently, she is a professor of media arts and sciences at the Massachusetts Institute of Technology and the director of the Personal Robots group at the MIT Media Lab. Her most recent work has focused on the theme of living everyday life in the presence of AI, and gradually gaining insight into the long-term impacts of social robots.

Rodney Allen Brooks is an Australian roboticist, Fellow of the Australian Academy of Science, author, and robotics entrepreneur, most known for popularizing the actionist approach to robotics. He was a Panasonic Professor of Robotics at the Massachusetts Institute of Technology and former director of the MIT Computer Science and Artificial Intelligence Laboratory. He is a founder and former Chief Technical Officer of iRobot and co-Founder, Chairman and Chief Technical Officer of Rethink Robotics and currently is the co-founder and Chief Technical Officer of Robust.AI.
Domo is an experimental robot made by the Massachusetts Institute of Technology designed to interact with humans. The brainchild of Jeff Weber and Aaron Edsinger, cofounders of Meka Robotics, its name comes from the Japanese phrase for "thank you very much", domo arigato, as well as the Styx song, "Mr. Roboto". The Domo project was originally funded by NASA, and has now been joined by Toyota in funding robot's development.
Developmental robotics (DevRob), sometimes called epigenetic robotics, is a scientific field which aims at studying the developmental mechanisms, architectures and constraints that allow lifelong and open-ended learning of new skills and new knowledge in embodied machines. As in human children, learning is expected to be cumulative and of progressively increasing complexity, and to result from self-exploration of the world in combination with social interaction. The typical methodological approach consists in starting from theories of human and animal development elaborated in fields such as developmental psychology, neuroscience, developmental and evolutionary biology, and linguistics, then to formalize and implement them in robots, sometimes exploring extensions or variants of them. The experimentation of those models in robots allows researchers to confront them with reality, and as a consequence, developmental robotics also provides feedback and novel hypotheses on theories of human and animal development.
Cognitive Robotics or Cognitive Technology is a subfield of robotics concerned with endowing a robot with intelligent behavior by providing it with a processing architecture that will allow it to learn and reason about how to behave in response to complex goals in a complex world. Cognitive robotics may be considered the engineering branch of embodied cognitive science and embodied embedded cognition, consisting of Robotic Process Automation, Artificial Intelligence, Machine Learning, Deep Learning, Optical Character Recognition, Image Processing, Process Mining, Analytics, Software Development and System Integration.
Robot learning is a research field at the intersection of machine learning and robotics. It studies techniques allowing a robot to acquire novel skills or adapt to its environment through learning algorithms. The embodiment of the robot, situated in a physical embedding, provides at the same time specific difficulties and opportunities for guiding the learning process.
The following outline is provided as an overview of and topical guide to artificial intelligence:
Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots. Robotics is related to the sciences of electronics, engineering, mechanics, and software. The word "robot" was introduced to the public by Czech writer Karel Čapek in his play R.U.R., published in 1920. The term "robotics" was coined by Isaac Asimov in his 1941 science fiction short-story "Liar!"
The core idea of artificial intelligence systems integration is making individual software components, such as speech synthesizers, interoperable with other components, such as common sense knowledgebases, in order to create larger, broader and more capable A.I. systems. The main methods that have been proposed for integration are message routing, or communication protocols that the software components use to communicate with each other, often through a middleware blackboard system.
Nouvelle artificial intelligence (AI) is an approach to artificial intelligence pioneered in the 1980s by Rodney Brooks, who was then part of MIT artificial intelligence laboratory. Nouvelle AI differs from classical AI by aiming to produce robots with intelligence levels similar to insects. Researchers believe that intelligence can emerge organically from simple behaviors as these intelligences interacted with the "real world", instead of using the constructed worlds which symbolic AIs typically needed to have programmed into them.
Moravec's paradox is the observation in artificial intelligence and robotics that, contrary to traditional assumptions, reasoning requires very little computation, but sensorimotor and perception skills require enormous computational resources. The principle was articulated by Hans Moravec, Rodney Brooks, Marvin Minsky and others in the 1980s. Moravec wrote in 1988: "it is comparatively easy to make computers exhibit adult level performance on intelligence tests or playing checkers, and difficult or impossible to give them the skills of a one-year-old when it comes to perception and mobility".
Neurorobotics is the combined study of neuroscience, robotics, and artificial intelligence. It is the science and technology of embodied autonomous neural systems. Neural systems include brain-inspired algorithms, computational models of biological neural networks and actual biological systems. Such neural systems can be embodied in machines with mechanic or any other forms of physical actuation. This includes robots, prosthetic or wearable systems but also, at smaller scale, micro-machines and, at the larger scales, furniture and infrastructures.
The following outline is provided as an overview of and topical guide to robotics:
In artificial intelligence research, the situated approach builds agents that are designed to behave effectively successfully in their environment. This requires designing AI "from the bottom-up" by focussing on the basic perceptual and motor skills required to survive. The situated approach gives a much lower priority to abstract reasoning or problem-solving skills.
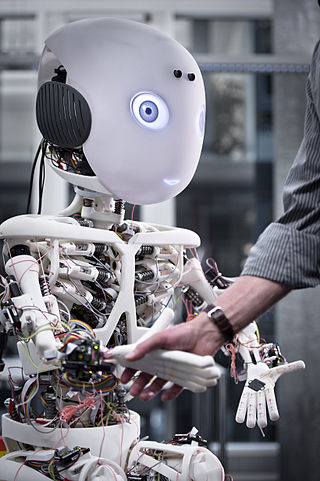
Roboy is an advanced humanoid robot that was developed at the Artificial Intelligence Laboratory of the University of Zurich, and was publicly presented on March 8, 2013. Originally designed to emulate humans with the future possibility of helping out in daily environments, Roboy is a project that has involved both engineers and scientists. Initiated in 2012 by Pascal Kaufmann, Roboy is the work of engineers who designed him according to design principles developed by Prof. Dr. Rolf Pfeifer, the AI lab director, in conjunction with the assistance of other development partners. Both the team members and the partners of the Roboy project share a commitment toward continued research in the area of soft robotics. Later Roboy was moved to Munich, Germany, where Rafael Hostettler conducts research on it at the Technical University. Since July 2020, Roboy is located back in Zurich, Switzerland in the offices of the Mindfire Foundation.
Cognitive computing refers to technology platforms that, broadly speaking, are based on the scientific disciplines of artificial intelligence and signal processing. These platforms encompass machine learning, reasoning, natural language processing, speech recognition and vision, human–computer interaction, dialog and narrative generation, among other technologies.

Sophia is a social humanoid robot developed by the Hong Kong-based company Hanson Robotics. Sophia was activated on February 14, 2016, and made her first public appearance in mid-March 2016 at South by Southwest (SXSW) in Austin, Texas, United States. Sophia is marketed as a "social robot" who can mimic social behavior and induce feelings of love in humans.
Engineered Arts is an English engineering, designer and manufacturer of humanoid robots based in Cornwall, England. It was founded in October 2004 by Will Jackson.

