
The Ames Research Center (ARC), also known as NASA Ames, is a major NASA research center at Moffett Federal Airfield in California's Silicon Valley. It was founded in 1939 as the second National Advisory Committee for Aeronautics (NACA) laboratory. That agency was dissolved and its assets and personnel transferred to the newly created National Aeronautics and Space Administration (NASA) on October 1, 1958. NASA Ames is named in honor of Joseph Sweetman Ames, a physicist and one of the founding members of NACA. At last estimate NASA Ames had over US$3 billion in capital equipment, 2,300 research personnel and a US$860 million annual budget.

An aerobot is an aerial robot, usually used in the context of an unmanned space probe or unmanned aerial vehicle.

Geoffrey Alan Landis is an American aerospace engineer and author, working for the National Aeronautics and Space Administration (NASA) on planetary exploration, interstellar propulsion, solar power and photovoltaics. He holds nine patents, primarily in the field of improvements to solar cells and photovoltaic devices and has given presentations and commentary on the possibilities for interstellar travel and construction of bases on the Moon, Mars, and Venus.

An ornithopter is an aircraft that flies by flapping its wings. Designers sought to imitate the flapping-wing flight of birds, bats, and insects. Though machines may differ in form, they are usually built on the same scale as flying animals. Larger, crewed ornithopters have also been built and some have been successful. Crewed ornithopters are generally either powered by engines or by the pilot.

A micro air vehicle (MAV), or micro aerial vehicle, is a class of man-portable miniature UAVs whose size enables them to be used in low-altitude, close-in support operations. Modern MAVs can be as small as 5 centimeters - compare Nano Air Vehicle. Development is driven by commercial, research, government, and military organizations; with insect-sized aircraft reportedly expected in the future. The small craft allow remote observation of hazardous environments or of areas inaccessible to ground vehicles. Hobbyists have designed MAVs for applications such as aerial robotics contests and aerial photography. MAVs can offer autonomous modes of flight.

The Discovery Program is a series of Solar System exploration missions funded by the U.S. National Aeronautics and Space Administration (NASA) through its Planetary Missions Program Office. The cost of each mission is capped at a lower level than missions from NASA's New Frontiers or Flagship Programs. As a result, Discovery missions tend to be more focused on a specific scientific goal rather than serving a general purpose.
The Ride Report is the informal name of the report titled NASA Leadership and America's Future in Space: A Report to the Administrator. In 1986, a task force under the leadership of Sally Ride was asked to formulate a new strategy for NASA. The report was issued in 1987.

The NASA Institute for Advanced Concepts (NIAC) is a NASA program for development of far reaching, long term advanced concepts by "creating breakthroughs, radically better or entirely new aerospace concepts". The program operated under the name NASA Institute for Advanced Concepts from 1998 until 2007, and was reestablished in 2011 under the name NASA Innovative Advanced Concepts and continues to the present. The NIAC program funds work on revolutionary aeronautics and space concepts that can dramatically impact how NASA develops and conducts its missions.

Robert C. Michelson is an American engineer and academic who invented the entomopter, a biologically inspired flapping-winged aerial robot, and who established the International Aerial Robotics Competition. Michelson's career began at the U.S. Naval Research Laboratory. He later became a member of the research faculty at the Georgia Institute of Technology. He is the author of three U.S. patents and over 100 journal papers, book chapters and reports. Michelson is the recipient of the 1998 AUVSI Pioneer Award and the 2001 Pirelli Award for the diffusion of scientific culture as well as the first Top Pirelli Prize.
The reciprocating chemical muscle (RCM) is a mechanism that takes advantage of the superior energy density of chemical reactions. It is a regenerative device that converts chemical energy into motion through a direct noncombustive chemical reaction.
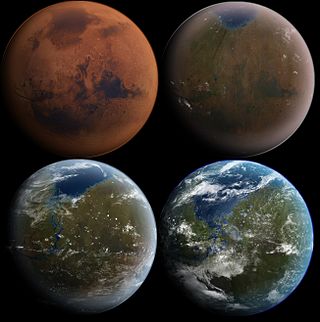
The terraforming of Mars or the terraformation of Mars is a hypothetical procedure that would consist of a planetary engineering project or concurrent projects aspiring to transform Mars from a planet hostile to terrestrial life to one that could sustainably host humans and other lifeforms free of protection or mediation. The process would involve the modification of the planet's extant climate, atmosphere, and surface through a variety of resource-intensive initiatives, as well as the installation of a novel ecological system or systems.
James D. DeLaurier is an inventor and professor emeritus of the University of Toronto Institute for Aerospace Studies. He is a leader in design and analysis of lighter than air vehicles and flapping winged aircraft.

The Aerial Regional-scale Environmental Survey (ARES) was a proposal by NASA's Langley Research Center to build a robotic, rocket-powered airplane that would fly one mile above the surface of Mars, in order to investigate the atmosphere, surface, and sub-surface of the planet. The ARES team, headed by Dr. Joel S. Levine, sought to be selected and funded as a NASA Mars Scout Mission for a 2011 or 2013 launch window. ARES was chosen as one of four finalists in the program, out of 25 potential programs. However, the Phoenix mission was ultimately chosen instead.

A Mars aircraft is a vehicle capable of sustaining powered flight in the atmosphere of Mars. So far, the Mars helicopter Ingenuity is the only aircraft ever to fly on Mars, completing 72 successful flights covering 17.242 km (10.714 mi) in 2 hours, 8 minutes and 48 seconds of flight time. Ingenuity operated on Mars for 1042 sols, until its rotor blades, possibly all four, were damaged, causing NASA to retire the craft.

The Asteroid Redirect Mission (ARM), also known as the Asteroid Retrieval and Utilization (ARU) mission and the Asteroid Initiative, was a space mission proposed by NASA in 2013; the mission was later cancelled. The Asteroid Retrieval Robotic Mission (ARRM) spacecraft would rendezvous with a large near-Earth asteroid and use robotic arms with anchoring grippers to retrieve a 4-meter boulder from the asteroid.

The DelFly is a fully controllable camera-equipped flapping wing Micro Air Vehicle or Ornithopter developed at the Micro Air Vehicle Lab of the Delft University of TechnologyArchived 2019-10-19 at the Wayback Machine in collaboration with Wageningen University.

Triton Hopper is a proposed NASA lander to Triton, the largest moon of Neptune. The idea is to harvest the abundant nitrogen ice on the surface of Triton and use it as propellant for multiple short flights and explore a variety of locations. The concept transitioned in March 2018 to Phase II to refine their designs and explore aspects of implementing the new technology.
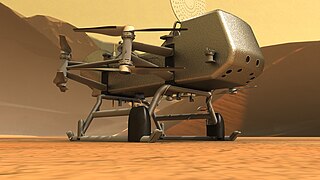
Dragonfly is a planned spacecraft and NASA mission to send a robotic rotorcraft to the surface of Titan, the largest moon of Saturn. It is planned to be launched in July 2028 and arrive in 2034. It would be the first aircraft on Titan and is intended to make the first powered and fully controlled atmospheric flight on any moon, with the intention of studying prebiotic chemistry and extraterrestrial habitability. It would then use its vertical takeoffs and landings (VTOL) capability to move between exploration sites.

Ingenuity, nicknamed Ginny, is an autonomous NASA helicopter that operated on Mars from 2021 to 2024 as part of the Mars 2020 mission. Ingenuity made its first flight on April 19, 2021, demonstrating that flight is possible in the extremely thin atmosphere of Mars, and becoming the first aircraft to conduct a powered and controlled extra-terrestrial flight. It was designed by NASA's Jet Propulsion Laboratory (JPL) in collaboration with AeroVironment, NASA's Ames Research Center and Langley Research Center with some components supplied by Lockheed Martin Space, Qualcomm, and SolAero.
Ralph D. Lorenz is a planetary scientist and engineer at the Johns Hopkins Applied Physics Lab. whose research focuses on understanding surfaces, atmospheres, and their interactions on planetary bodies, especially Titan, Venus, Mars, and Earth. He currently serves as Mission Architect of Dragonfly, NASA's fourth selected New Frontiers mission, and as participating scientist on Akatsuki and InSight. He is a Co-Investigator on the SuperCam instrument on the Perseverance rover, responsible for interpreting data from its microphone. He leads the Venus Atmospheric Structure Investigation on the DAVINCI Discovery mission to Venus. He is the recipient of the 2020 International Planetary Probe Workshop (IPPW) Al Seiff memorial award, and the 2022 American Geophysical Union's Fred Whipple Award for contributions to planetary science.

