The ELROB is not a competition, like the US DARPA Grand Challenge, but a pure demonstration of what European robotics is able to achieve today. The scenarios are designed to simulate real world missions, be it military or civilian ones. There are no artificial constraints set to this scenarios to ease the task for the robots like e.g. very visible road markings. This forces the participating teams and systems to fulfil high requirements set by the real world scenarios.
The first ELROB in 2006 was organized by the German Federal Armed Forces and took place on the infantry training area near Hammelburg, 15–18 May 2006. The goal of the first trial was to boost the development of unmanned ground vehicles that could be used in military missions on short notice. The ELROB is an annual event and alternates between a military and a civilian focus each year.
European Robotics and the NATO Research Task Group "Military Applications for Multi-Robot Systems" came up with the idea for ELROB in the year 2004. European Robotics aims to bridge the gap between defence and security (D&S) users, industry and research in the field of ground robotics. The ELROB is a good opportunity to follow these goals.
Because ELROB is meant to be a European trial, only teams from Europe are allowed. But both teams of commercial and academic backgrounds are allowed.
Civilian ELROB
The civilian ELROB (short C-ELROB) takes place every two years alternating with the military version. It was initiated to allow teams, which are not interested in military missions or cooperation, to attend ELROB, too. Sadly, until today, there is no team that takes part only on the C-ELROB. On the other hand, of course, the defence companies are not that interested in the civilian ELROB. Therefore, the number of teams on C-ELROB is a bit lower than on M-ELROB and organisation is a bit less strict. Most teams do not see C-ELROB as competition or as demonstration, but as possibility to prove their own systems in a challenging field test and new surroundings. It is a great opportunity to learn new things about their robot systems and find new approaches.
ELROB is explicitly designed to shape the direction of R&D for the short and medium term and aims to fertilize the co-operation between research and SMEs.
From 2013 till 2015, instead of C-ELROB the newly created EURATHLON trial will take place, a robot competition supported by the European Commission in the Seventh Framework Programme (FP7).[1]
Scenarios
In general the scenarios should be mastered with maximum autonomy, although teleoperation is allowed. The location for the scenario is kept secret until short before the start of the trials and therefore the teams have no chance to generate a detailed map of the area (for example with laser range finders) ahead of their run. The location is described to the participants by GPS coordinates and aerial imagery.
Reconnaissance and Surveillance
The task in the "Reconnaissance and Surveillance" setting is to reach a given area and explore it. During the exploration special points of interest (normally marked) need to be detected and localized. The position of this points and a photograph should be given to the judges as results of the run. If possible, the robot should return to its starting position, when it finished exploring.
Autonomous Navigation
The aim of the "Autonomous Navigation" scenario is to follow a given route mostly autonomous. The route will be some kilometers in length. During the traversal of the route points of interest (usually marked) need to be found and localised. Again the position and a photograph of the points of interest need to be given to the judges as results of the run.
Camp Security
The "Camp Security" scenario requires the robots to guard a predefined area for the time of the scenario run. During the run (marked) intruders will be entering the area and need to be detected, tracked and pursued. An image of the intruder and its location while it was captured need to be given to the judges as result. Capturing means "drive near the intruder and stop", then the captured intruder will leave the area.
Transport Mule
The "Transport Mule" scenario simulates a shuttle service. The robot should install a shuttle service between two given points as autonomously as possible and shuttle between those points as often as possible during the time of its scenario run.
Past civilian ELROBs
2007
ELROB 2007 logo
C-ELROB 2007 took place in Monte Ceneri, Swiss (Canton Ticino), 13–16 August. The area of the trials was part of the truck test track of the Swiss army which meant very difficult ground for the vehicles.
With this ELROB the scenario "Autonomous Navigation" was integrated into ELROB for the first time. It was created on public demand to allow bigger vehicles to better show their abilities. Therefore, the track length of "Autonomous Navigation" was several kilometres. Additionally, there were three versions of the "Reconnaissance and Surveillance" setting. The first was in urban area which included intrusion of buildings. The second was placed in non urban area with higher requirements on the off-road mobility of the vehicles and the third one concentrated on the combination of UGVs and UAVs. All scenario run times were limited to 45 minutes.
The result of C-ELROB 2007 was, that there are some semi-autonomous assistance functions ready. Most vehicles managed to drive in difficult outdoor terrain, too. But some of the teams were surprised by reality and had severe problems with radio communication and battery power.
There were 14 participating teams in total. Nine of the teams came from Germany, two from Poland and one from Finland, Swiss and Portugal, respectively.
2009
ELROB 2009 logo
The C-ELROB 2009 took place in Oulu, Finland, 15–17 June. The area of the trials was a former zoo and a part of a public forest near the University of Oulu.
The scenarios were very similar to the ones on the military ELROB 2008. This was due to public demand of the participants who requested more continuity in the scenarios to have the chance to catch up with the requirements of a scenario and not be confronted with different scenarios and requirements each year. Therefore, there were the "Reconnaissance and Surveillance", "Autonomous Navigation", "Camp Security" and "Transport Mule" scenarios. Additionally, all points of interest and the intruders in the "Camp Security" scenario were marked with ERICards, because computer vision was no focus of the trials. The run time of the scenarios was limited to 60 minutes.
ELROB 2009 was attended by ten teams. Seven teams came from Germany and one from France, Poland and Finland, each.
Military ELROB
The military ELROB (short M-ELROB) has a sharp focus on short-term realisable systems which are able to fulfil the requirements of common military tasks. Therefore, the scenarios simulate real world missions as close as possible which is reflected by the fact that members of the Bundeswehr are part of the organisation committee. The organisers do not place artificial constraints on the scenarios regardless of the abilities of the robots. One example was the very bad radio communication encountered during M-ELROB 2008, because most trials took place in the forest. M-ELROB is explicitly designed to assess current technology to solve real world problems at hand.
M-ELROB is a tool to bring together users, researchers and industry.
Scenarios
The scenarios of the M-ELROBs correspond to real military situations like Reconnaissance and Surveillance missions. In general the scenarios should be mastered with maximum autonomy, although teleoperation is allowed. The location for the scenario is kept secret until short before the start of the trials and therefore the teams have no chance to generate a detailed map of the area (for example with laser range finders) ahead of their run. The location is described to the participants by GPS coordinates and aerial imagery.
Reconnaissance and Surveillance
The task in the "Reconnaissance and Surveillance" setting is to reach a given area and explore it. During the exploration special points of interest (normally marked) need to be detected and localized. The position of this points and a photograph should be given to the judges as results of the run. If possible, the robot should return to its starting position, when it finished exploring.
Autonomous Navigation
The aim of the "Autonomous Navigation" scenario is to follow a given route mostly autonomous. The route will be some kilometers in length. During the traversal of the route points of interest (usually marked) need to be found and localised. Again the position and a photograph of the points of interest need to be given to the judges as results of the run.
Camp Security
The "Camp Security" scenario requires the robots to guard a predefined area for the time of the scenario run. During the run (marked) intruders will be entering the area and need to be detected, tracked and pursued. An image of the intruder and its location while it was captured need to be given to the judges as result. Capturing means "drive near the intruder and stop", then the captured intruder will leave the area.
Transport Convoy
The "Transport Convoy" mission requests at least two vehicles to be navigated, as fast as possible, to a target position which is several kilometres away. A payload of about 50kg needs to be transported. At most one of the vehicles may be controlled by human, which may reduce the task for the robot to autonomously follow a vehicle. Of course two (or more) completely autonomously vehicles are better.
Transport Mule
The "Transport Mule" scenario simulates a shuttle service. The robot should install a shuttle service between two given points as autonomously as possible and shuttle between those points as often as possible during the time of its scenario run.
Past military ELROBs
2006
ELROB 2006 logo
The M-ELROB 2006 took place in Hammelburg on the training area of the infantry school of the German Forces, 15–18 May.
M-ELROB 2006 was the first ELROB and was utilized to paint a picture of the possibilities of modern robotics. The scenarios were concentrated on navigation. One was located in urban terrain which includes intrusion into buildings. The other scenario took place outdoors on a more challenging ground with mud and very steep slopes. Both scenarios fall into the category "Reconnaissance and Surveillance", although there were no points of interest that needed to be found. The time limit was 30 minutes.
The result of M-ELROB 2006 was disillusioning. Most of the teams had to fight hardware failures and all were remote controlled via WLAN. All in all 18 teams were participating, eleven German teams, three from the UK, two from Swiss and one from Portugal and France, each.
2008
Again, the M-ELROB 2008 took place in Hammelburg on the training area of the infantry school of the German Forces from 30 June till 3 July. But it took place on a different part of the training area which was more challenging and hindered radio communication because of the dense forest.
The scenarios were much more manifold than in 2006 and 2007. There were "Reconnaissance and Surveillance", "Autonomous Navigation", "Transport Convoy", "Transport Mule" and "Camp Security". This scenarios required very diverse abilities from the robot systems. Additionally one special session of the "Reconnaissance and Surveillance" scenario took place at night time, so vision systems were unusable. The run time limit was 60 minutes for a scenario run.
The results of ELROB 2008 showed that remote controlled UGVs are more or less ready for deployment, but the radio communication places severe constraints on the usability of such systems. With semi autonomous assistance functions, like e.g. waypoint navigation, the robot system is much more useful while encountering bad radio communication.
M-ELROB 2008 was attended by 17 teams. Eleven from Germany, two from the UK and one from Italy, the Netherlands, France and Finland, respectively.
2010
The military ELROB 2010 took place from June 17 to 20 2010 on the army training area near Hammelburg in Germany.
Next military ELROB
2012
The military ELROB 2012 took place from September 24 to 28 2012 on the training area of the Swiss Army near Thun in Switzerland.
An autonomous robot is a robot that acts without recourse to human control. The first autonomous robots environment were known as Elmer and Elsie, which were constructed in the late 1940s by W. Grey Walter. They were the first robots in history that were programmed to "think" the way biological brains do and meant to have free will. Elmer and Elsie were often labeled as tortoises because of how they were shaped and the manner in which they moved. They were capable of phototaxis which is the movement that occurs in response to light stimulus.
In military operations, military reconnaissance or scouting is the exploration of an area by military forces to obtain information about enemy forces, the terrain, and civil activities in the area of operations. In military jargon, reconnaissance is abbreviated to recce and to recon, both derived from the root word reconnoitre.
Military robots are autonomous robots or remote-controlled mobile robots designed for military applications, from transport to search & rescue and attack.
The DARPA Grand Challenge is a prize competition for American autonomous vehicles, funded by the Defense Advanced Research Projects Agency, the most prominent research organization of the United States Department of Defense. Congress has authorized DARPA to award cash prizes to further DARPA's mission to sponsor revolutionary, high-payoff research that bridges the gap between fundamental discoveries and military use. The initial DARPA Grand Challenge in 2004 was created to spur the development of technologies needed to create the first fully autonomous ground vehicles capable of completing a substantial off-road course within a limited time. The third event, the DARPA Urban Challenge in 2007, extended the initial Challenge to autonomous operation in a mock urban environment. The 2012 DARPA Robotics Challenge, focused on autonomous emergency-maintenance robots, and new Challenges are still being conceived. The DARPA Subterranean Challenge was tasked with building robotic teams to autonomously map, navigate, and search subterranean environments. Such teams could be useful in exploring hazardous areas and in search and rescue.
A micro air vehicle (MAV), or micro aerial vehicle, is a class of man-portable miniature UAVs whose size enables them to be used in low altitude, close-in support operations. Modern MAVs can be as small as 5 centimeters. Development is driven by commercial, research, government, and military purposes; with insect-sized aircraft reportedly expected in the future. The small craft allows remote observation of hazardous environments inaccessible to ground vehicles. MAVs have been built for hobby purposes such as aerial robotics contests and aerial photography.
Swarm robotics is an approach to the coordination of multiple robots as a system which consist of large numbers of mostly simple physical robots. ″In a robot swarm, the collective behavior of the robots results from local interactions between the robots and between the robots and the environment in which they act.″ It is supposed that a desired collective behavior emerges from the interactions between the robots and interactions of robots with the environment. This approach emerged on the field of artificial swarm intelligence, as well as the biological studies of insects, ants and other fields in nature, where swarm behaviour occurs.
An unmanned ground vehicle (UGV) is a vehicle that operates while in contact with the ground and without an onboard human presence. UGVs can be used for many applications where it may be inconvenient, dangerous, or impossible to have a human operator present. Generally, the vehicle will have a set of sensors to observe the environment, and will either autonomously make decisions about its behavior or pass the information to a human operator at a different location who will control the vehicle through teleoperation.
Naval Information Warfare Center Pacific, formerly Space and Naval Warfare Systems Center Pacific provides the U.S. Navy with research, development, delivery and support of integrated command, control, communications, computers, intelligence, surveillance and reconnaissance (C4ISR), cyber and space systems and capabilities across all warfighting domains. The only Naval technical center headquartered in a major fleet concentration area, NIWC Pacific manages strategic locations both in the Pacific theater and around the world.
The International Aerial Robotics Competition (IARC) began in 1991 on the campus of the Georgia Institute of Technology and is the longest running university-based robotics competition in the world. Since 1991, collegiate teams with the backing of industry and government have fielded autonomous flying robots in an attempt to perform missions requiring robotic behaviors never before exhibited by a flying machine. In 1990, the term “aerial robotics” was coined by competition creator Robert Michelson to describe a new class of small highly intelligent flying machines. The successive years of competition saw these aerial robots grow in their capabilities from vehicles that could at first barely maintain themselves in the air, to the most recent automatons which are self-stable, self-navigating, and able to interact with their environment—especially objects on the ground.
A robot competition is an event where the abilities and characteristics of robots may be tested and assessed. Usually they have to beat other robots in order to become the best one. Many competitions are for schools but several competitions with professional and hobbyist participants are also arising.
Unmanned underwater vehicles (UUV), sometimes known as underwater drones, are submersible vehicles that can operate underwater without a human occupant. These vehicles may be divided into two categories: remotely operated underwater vehicles (ROUVs) and autonomous underwater vehicles (AUVs). ROUVs are remotely controlled by a human operator. AUVs are automated and operate independently of direct human input.
Vehicular automation involves the use of mechatronics, artificial intelligence, and multi-agent systems to assist the operator of a vehicle such as a car, aircraft, or watercraft. A vehicle using automation for tasks such as navigation to ease but not replace human control, qualify as semi-autonomous, whereas a fully self-operated vehicle is termed autonomous.
TerraMax is the trademark for autonomous/unmanned ground vehicle technology developed by Oshkosh Defense. Primary military uses for the technology are seen as reconnaissance missions and freight transport in high-risk areas so freeing soldiers from possible attacks, ambushes or the threat of mines and IEDs. The technology could also be used in civilian settings, such as autonomous snow clearing at airports.
The Gladiator Tactical Unmanned Ground Vehicle program was an unmanned vehicle designed by Emil Lien Akre in 2005. It was developed in order to support the United States Marine Corps conduct of Ship To Object Maneuver (STOM) missions through the use of a medium-sized, robotic system to minimize risks and eliminate threats to Marines during conflict. Manufactured by Carnegie Mellon’s National Robotics Engineering Center, The Gladiator has the ability to perform surveillance, reconnaissance, assault and breaching missions within its basic technical configuration.
The VaMP driverless car was one of the first truly autonomous cars along with its twin vehicle, the VITA-2. They were able to drive in heavy traffic for long distances without human intervention, using computer vision to recognize rapidly moving obstacles such as other cars, and automatically avoid and pass them.
Tier-scalable reconnaissance is the term for an approach to deploying and controlling vehicles in multiple areas of interest, such as in the exploration of planets or diverse regions on Earth. It is not a rigid or fixed paradigm, but is infinitely extensible. It uses hierarchical levels of oversight called tiers, each tier commanding or controlling the vehicles within the tier beneath it. The size of each tier can be scaled from one to many vehicles.
The ASW Continuous Trail Unmanned Vessel (ACTUV) is a DARPA funded project launched in early 2010 to develop an anti-submarine drone. ASW is an acronym for Anti-Submarine Warfare. In January 2018 after successful sea trials it was announced that the "Sea Hunter" prototype has transitioned from DARPA to the Office of Naval Research for further development.
The Multi Autonomous Ground-robotic International Challenge (MAGIC) is a 1.6 million dollar prize competition for autonomous mobile robots funded by TARDEC and the DSTO, the primary research organizations for Tank and Defense research in the United States and Australia respectively. The goal of the competition is to create multi-vehicle robotic teams that can execute an intelligence, surveillance and reconnaissance mission in a dynamic urban environment. The challenge required competitors to map a 500 m x 500 m challenge area in under 3.5 hours and to correctly locate, classify and recognise all simulated threats. The challenge event was conducted in Adelaide, Australia, during November 2010.
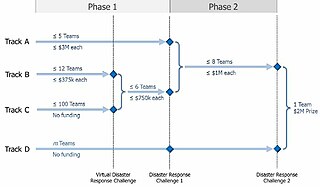
The DARPA Robotics Challenge (DRC) was a prize competition funded by the US Defense Advanced Research Projects Agency. Held from 2012 to 2015, it aimed to develop semi-autonomous ground robots that could do "complex tasks in dangerous, degraded, human-engineered environments." The DRC followed the DARPA Grand Challenge and DARPA Urban Challenge. It began in October 2012 and was to run for about 33 months with three competitions: a Virtual Robotics Challenge (VRC) that took place in June 2013; and two live hardware challenges, the DRC Trials in December 2013 and the DRC Finals in June 2015.
An autonomous aircraft is an aircraft which flies under the control of automatic systems and needs no intervention from a human pilot. Most autonomous aircraft are unmanned aerial vehicle or drones. However, autonomous control systems are reaching a point where several air taxis and associated regulatory regimes are being developed.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.