
Geodesy is the science of measuring and representing the geometry, gravity, and spatial orientation of the Earth in temporally varying 3D. It is called planetary geodesy when studying other astronomical bodies, such as planets or circumplanetary systems.

In geography, latitude is a coordinate that specifies the north–south position of a point on the surface of the Earth or another celestial body. Latitude is given as an angle that ranges from –90° at the south pole to 90° at the north pole, with 0° at the Equator. Lines of constant latitude, or parallels, run east–west as circles parallel to the equator. Latitude and longitude are used together as a coordinate pair to specify a location on the surface of the Earth.
Precession is a change in the orientation of the rotational axis of a rotating body. In an appropriate reference frame it can be defined as a change in the first Euler angle, whereas the third Euler angle defines the rotation itself. In other words, if the axis of rotation of a body is itself rotating about a second axis, that body is said to be precessing about the second axis. A motion in which the second Euler angle changes is called nutation. In physics, there are two types of precession: torque-free and torque-induced.

A gyroscope is a device used for measuring or maintaining orientation and angular velocity. It is a spinning wheel or disc in which the axis of rotation is free to assume any orientation by itself. When rotating, the orientation of this axis is unaffected by tilting or rotation of the mounting, according to the conservation of angular momentum.

A gyrocompass is a type of non-magnetic compass which is based on a fast-spinning disc and the rotation of the Earth to find geographical direction automatically. The use of a gyrocompass is one of the seven fundamental ways to determine the heading of a vehicle. A gyroscope is an essential component of a gyrocompass, but they are different devices; a gyrocompass is built to use the effect of gyroscopic precession, which is a distinctive aspect of the general gyroscopic effect. Gyrocompasses are widely used for navigation on ships, because they have two significant advantages over magnetic compasses:
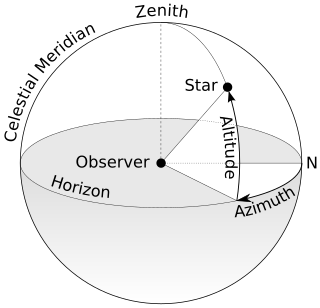
An azimuth is an angular measurement in a spherical coordinate system. More specifically, it is the horizontal angle from a cardinal direction, most commonly north.
The equatorial coordinate system is a celestial coordinate system widely used to specify the positions of celestial objects. It may be implemented in spherical or rectangular coordinates, both defined by an origin at the centre of Earth, a fundamental plane consisting of the projection of Earth's equator onto the celestial sphere, a primary direction towards the vernal equinox, and a right-handed convention.

The Foucault pendulum or Foucault's pendulum is a simple device named after French physicist Léon Foucault, conceived as an experiment to demonstrate the Earth's rotation. A long and heavy pendulum suspended from the high roof above a circular area was monitored over an extended time period, showing that the plane of oscillation rotated.

A theodolite is a precision optical instrument for measuring angles between designated visible points in the horizontal and vertical planes. The traditional use has been for land surveying, but it is also used extensively for building and infrastructure construction, and some specialized applications such as meteorology and rocket launching.

A telescope mount is a mechanical structure which supports a telescope. Telescope mounts are designed to support the mass of the telescope and allow for accurate pointing of the instrument. Many sorts of mounts have been developed over the years, with the majority of effort being put into systems that can track the motion of the fixed stars as the Earth rotates.

An altazimuth mount or alt-azimuth mount is a simple two-axis mount for supporting and rotating an instrument about two perpendicular axes – one vertical and the other horizontal. Rotation about the vertical axis varies the azimuth of the pointing direction of the instrument. Rotation about the horizontal axis varies the altitude angle of the pointing direction.
Geodetic astronomy or astronomical geodesy (astro-geodesy) is the application of astronomical methods into geodetic networks and other technical projects of geodesy.
The meridian circle is an instrument for timing of the passage of stars across the local meridian, an event known as a culmination, while at the same time measuring their angular distance from the nadir. These are special purpose telescopes mounted so as to allow pointing only in the meridian, the great circle through the north point of the horizon, the north celestial pole, the zenith, the south point of the horizon, the south celestial pole, and the nadir. Meridian telescopes rely on the rotation of the sky to bring objects into their field of view and are mounted on a fixed, horizontal, east–west axis.
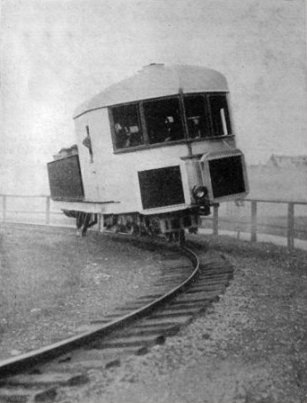
The gyro monorail, gyroscopic monorail, gyro-stabilized monorail, or gyrocar are terms for a single rail land vehicle that uses the gyroscopic action of a spinning wheel to overcome the inherent instability of balancing on top of a single rail.
A Rate integrating gyroscope is a rate gyro with a built in integrator. It is usually a component of an Inertial Measurement Unit or a stabilization system.

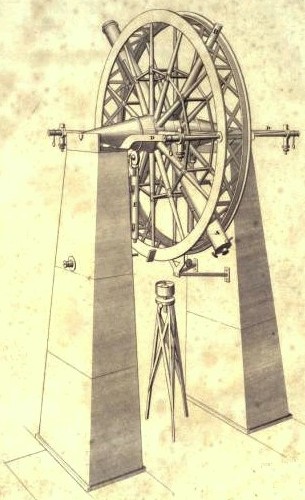
In astronomy, a transit instrument is a small telescope with extremely precisely graduated mount used for the precise observation of star positions. They were previously widely used in astronomical observatories and naval observatories to measure star positions in order to compile nautical almanacs for use by mariners for celestial navigation, and observe star transits to set extremely accurate clocks which were used to set marine chronometers carried on ships to determine longitude, and as primary time standards before atomic clocks. The instruments can be divided into three groups: meridian, zenith, and universal instruments.

An inertial navigation system (INS) is a navigation device that uses motion sensors (accelerometers), rotation sensors (gyroscopes) and a computer to continuously calculate by dead reckoning the position, the orientation, and the velocity of a moving object without the need for external references. Often the inertial sensors are supplemented by a barometric altimeter and sometimes by magnetic sensors (magnetometers) and/or speed measuring devices. INSs are used on mobile robots and on vehicles such as ships, aircraft, submarines, guided missiles, and spacecraft. Other terms used to refer to inertial navigation systems or closely related devices include inertial guidance system, inertial instrument, inertial measurement unit (IMU) and many other variations. Older INS systems generally used an inertial platform as their mounting point to the vehicle and the terms are sometimes considered synonymous.

The LN-3 inertial navigation system is an inertial navigation system (INS) that was developed in the 1960s by Litton Industries. It equipped the Lockheed F-104 Starfighter versions used as strike aircraft in European forces. An inertial navigation system is a system which continually determines the position of a vehicle from measurements made entirely within the vehicle using sensitive instruments. These instruments are accelerometers which detect and measure vehicle accelerations, and gyroscopes which act to hold the accelerometers in proper orientation.
Spacecraft attitude control is the process of controlling the orientation of a spacecraft with respect to an inertial frame of reference or another entity such as the celestial sphere, certain fields, and nearby objects, etc.

Burt's solar compass or astronomical compass is a surveying instrument that makes use of the Sun's direction instead of magnetism. William Austin Burt invented his solar compass in 1835. The solar compass works on the principle that the direction to the Sun at a specified time can be calculated if the position of the observer on the surface of the Earth is known, to a similar precision. The direction can be described in terms of the angle of the Sun relative to the axis of rotation of the planet.
