Related Research Articles

General surgery is a surgical specialty that focuses on alimentary canal and abdominal contents including the esophagus, stomach, small intestine, large intestine, liver, pancreas, gallbladder, appendix and bile ducts, and often the thyroid gland. They also deal with diseases involving the skin, breast, soft tissue, trauma, peripheral artery disease and hernias and perform endoscopic as such as gastroscopy, colonoscopy and laparoscopic procedures.

Urology, also known as genitourinary surgery, is the branch of medicine that focuses on surgical and medical diseases of the urinary-tract system and the reproductive organs. Organs under the domain of urology include the kidneys, adrenal glands, ureters, urinary bladder, urethra, and the male reproductive organs.
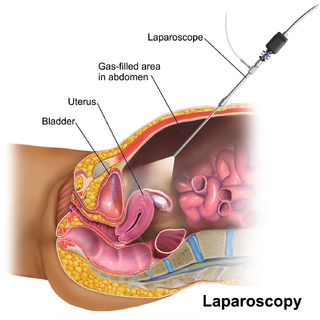
Laparoscopy is an operation performed in the abdomen or pelvis using small incisions with the aid of a camera. The laparoscope aids diagnosis or therapeutic interventions with a few small cuts in the abdomen.
Robotic control is the system that contributes to the movement of robots. This involves the mechanical aspects and programmable systems that makes it possible to control robots. Robotics can be controlled by various means including manual, wireless, semi-autonomous, and fully autonomous.
Remote surgery is the ability for a doctor to perform surgery on a patient even though they are not physically in the same location. It is a form of telepresence. A robot surgical system generally consists of one or more arms, a master controller (console), and a sensory system giving feedback to the user. Remote surgery combines elements of robotics, telecommunications such as high-speed data connections and elements of management information systems. While the field of robotic surgery is fairly well established, most of these robots are controlled by surgeons at the location of the surgery. Remote surgery is remote work for surgeons, where the physical distance between the surgeon and the patient is less relevant. It promises to allow the expertise of specialized surgeons to be available to patients worldwide, without the need for patients to travel beyond their local hospital.
Surgical oncology is the branch of surgery applied to oncology; it focuses on the surgical management of tumors, especially cancerous tumors.

Minimally invasive procedures encompass surgical techniques that limit the size of incisions needed, thereby reducing wound healing time, associated pain, and risk of infection. Surgery by definition is invasive and many operations requiring incisions of some size are referred to as open surgery. Incisions made during open surgery can sometimes leave large wounds that may be painful and take a long time to heal. Advancements in medical technologies have enabled the development and regular use of minimally invasive procedures. For example, endovascular aneurysm repair, a minimally invasive surgery, has become the most common method of repairing abdominal aortic aneurysms in the US as of 2003. The procedure involves much smaller incisions than the corresponding open surgery procedure of open aortic surgery.
The Lindbergh operation was a complete tele-surgical operation carried out by a team of French surgeons located in New York on a patient in Strasbourg, France using telecommunications solutions based on high-speed services and sophisticated Zeus surgical robot. The operation was performed successfully on September 7, 2001 by Professor Jacques Marescaux and his team from the IRCAD. This was the first time in medical history that a technical solution proved capable of reducing the time delay inherent to long distance transmissions sufficiently to make this type of procedure possible. The name was derived from the American aviator Charles Lindbergh, because he was the first person to fly solo across the Atlantic Ocean.
Image-guided surgery (IGS) is any surgical procedure where the surgeon uses tracked surgical instruments in conjunction with preoperative or intraoperative images in order to directly or indirectly guide the procedure. Image guided surgery systems use cameras, ultrasonic, electromagnetic or a combination of fields to capture and relay the patient's anatomy and the surgeon's precise movements in relation to the patient, to computer monitors in the operating room or to augmented reality headsets. This is generally performed in real-time though there may be delays of seconds or minutes depending on the modality and application.

Robot-assisted surgery or robotic surgery are any types of surgical procedures that are performed using robotic systems. Robotically assisted surgery was developed to try to overcome the limitations of pre-existing minimally-invasive surgical procedures and to enhance the capabilities of surgeons performing open surgery.
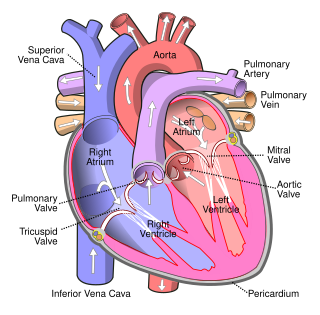
Mitral valve repair is a cardiac surgery procedure performed by cardiac surgeons to treat stenosis (narrowing) or regurgitation (leakage) of the mitral valve. The mitral valve is the "inflow valve" for the left side of the heart. Blood flows from the lungs, where it picks up oxygen, through the pulmonary veins, to the left atrium of the heart. After the left atrium fills with blood, the mitral valve allows blood to flow from the left atrium into the heart's main pumping chamber called the left ventricle. It then closes to keep blood from leaking back into the left atrium or lungs when the ventricle contracts (squeezes) to push blood out to the body. It has two flaps, or leaflets, known as cusps.

Adrenalectomy is the surgical removal of one or both adrenal glands. It is usually done to remove tumors of the adrenal glands that are producing excess hormones or is large in size. Adrenalectomy can also be done to remove a cancerous tumor of the adrenal glands, or cancer that has spread from another location, such as the kidney or lung. Adrenalectomy is not performed on those who have severe coagulopathy or whose heart and lungs are too weak to undergo surgery. The procedure can be performed using an open incision (laparotomy) or minimally invasive laparoscopic or robot-assisted techniques. Minimally invasive techniques are increasingly the gold standard of care due to shorter length of stay in the hospital, lower blood loss, and similar complication rates.
Intuitive Surgical, Inc. is an American corporation that develops, manufactures, and markets robotic products designed to improve clinical outcomes of patients through minimally invasive surgery, most notably with the da Vinci Surgical System. The company is part of the NASDAQ-100 and S&P 500. As of 31 December 2021, Intuitive Surgical had an installed base of 6,730 da Vinci Surgical Systems, including 4,139 in the U.S., 1,199 in Europe, 1,050 in Asia, and 342 in the rest of the world.
Tubal reversal, also called tubal sterilization reversal, tubal ligation reversal, or microsurgical tubal reanastomosis, is a surgical procedure that can restore fertility to women after a tubal ligation. By rejoining the separated segments of the fallopian tube, tubal reversal can give women the chance to become pregnant again. In some cases, however, the separated segments cannot actually be reattached to each other. In some cases the remaining segment of tube needs to be re-implanted into the uterus. In other cases, when the end of the tube has been removed, a procedure called a neofimbrioplasty must be performed to recreate a functional end of the tube which can then act like the missing fimbria and retrieve the egg that has been released during ovulation.
Computer-assisted surgery (CAS) represents a surgical concept and set of methods, that use computer technology for surgical planning, and for guiding or performing surgical interventions. CAS is also known as computer-aided surgery, computer-assisted intervention, image-guided surgery, digital surgery and surgical navigation, but these are terms that are more or less synonymous with CAS. CAS has been a leading factor in the development of robotic surgery.

Mani Menon, born 9 July 1948 in Trichur, India, is an American surgeon whose pioneering work has helped to lay the foundation for modern Robotic Cancer Surgery. He is the founding director and the Raj and Padma Vattikuti Distinguished Chair of the Vattikuti Urology Institute at the Henry Ford Hospital in Detroit, MI, where he established the first cancer-oriented robotics program in the world. Menon is widely regarded for his role in the development of robotic surgery techniques for the treatment of patients with prostate, kidney, and bladder cancers, as well as for the development of robotic kidney transplantation.
Menon is the recipient of the Gold Cystoscope award, Hugh Hampton Young award, the Keyes Medal, the prestigious B.C. Roy award.
The ZEUS Robotic Surgical System (ZRSS) was a medical robot designed to assist in surgery, originally produced by the American robotics company Computer Motion. Its predecessor, AESOP, was cleared by the Food and Drug Administration in 1994 to assist surgeons in minimally invasive surgery. The ZRSS itself was cleared by the FDA seven years later, in 2001. ZEUS had three robotic arms, which were remotely controlled by the surgeon. The first arm, AESOP, was a voice-activated endoscope, allowing the surgeon to see inside the patient's body. The other two robotic arms mimicked the surgeon's movements to make precise incisions and extractions. ZEUS was discontinued in 2003, following the merger of Computer Motion with its rival Intuitive Surgical; the merged company instead developed the Da Vinci Surgical System.

Justin is an autonomous and programmable humanoid robot with two arms, developed by the German Aerospace Center (DLR) at the Institute of Robotics and Mechatronics, located in Wessling, Germany. Introduced in 2009, this wireless robot is controllable through telepresence, a type of technology that allows a person to feel as if he or she were present from a location other than his or her true location.

Timothy J. Broderick, F.A.C.S., is Professor of Surgery and Biomedical Engineering at the University of Cincinnati, where he has served on the faculty since 2003. He also serves as Chief of the Division of Gastrointestinal and Endocrine Surgery and is Director of the Advanced Center for Telemedicine and Surgical Innovation (ACTSI). He has flown on the NASA KC-135 parabolic laboratory and dived in the NASA Extreme Environment Mission Operations (NEEMO) program to develop advanced surgical technologies for long duration space flight.
Pradeep Kumar Chowbey is an Indian surgeon, known for laparoscopic and bariatric surgeries. He is the incumbent Executive vice chairman of the Max Healthcare, Chairman of the Minimal Access, Metabolic & Bariatric Surgery and Allied Surgical Specialities of the Max Healthcare Institute, New Delhi. He is the founder of the Minimal Access, Metabolic & Bariatric Surgery Centre at the Sir Ganga Ram Hospital, New Delhi and has served as the Honorary Surgeon to the President of India, Dalai Lama and the Indian Armed Forces (AFMS). The Government of India awarded him the fourth highest civilian honour of the Padma Shri in 2002.
References
- ↑ Hagn, Ulrich; Konietschke, R.; Tobergte, A.; Nickl, M.; Jörg, S.; Kuebler, B.; Passig, G.; Gröger, M.; Fröhlich, F.; Seibold, U.; Le-Tien, L.; Albu-Schäffer, A.; Nothelfer, A.; Hacker, F.; Grebenstein, M.; Hirzinger, G. (2010). "The DLR MiroSurge: a versatile system for research in endoscopic telesurgery" (PDF). International Journal of Computer Assisted Radiology and Surgery. 5 (2): 183–193. doi:10.1007/s11548-009-0372-4. PMID 20033517. S2CID 10427995.
- ↑ "MiroSurge". TUM Miti. Archived from the original on 2012-09-03. Retrieved 2012-05-04.
- ↑ "Medical Robotics Research". COMPAMED. Retrieved 2012-05-04.
- ↑ "SAFROS- SAFety in RObotic Surgery". LSRO / SAFROS. Retrieved 2012-05-04.
- ↑ Groeger, Martin; Arbter, K.; Hirzinger, G. (2008). "Motion Tracking for Minimally Invasive Robotic Surgery". Medical Robotics: 117–148.
- ↑ Hagn, Ulrich; Nickl, Matthias; Jörg, Stephan; Passig, Georg; Bahls, Thomas; Nothhelfer, Alexander; Hacker, Franz; Le-Tien, Luc; Albu-Schäffer, Alin; Konietschke, Rainer; Grebenstein, Markus; Warpup, Rebecca; Haslinger, Robert; Frommberger, Mirko; Hirzinger, Gerd (2008). "The DLR MIRO: A versatile lightweight robot for surgical applications" (PDF). Industrial Robot. 35 (4): 324–336. doi:10.1108/01439910810876427.
- ↑ Thielmann, Sophie; Seibold, U.; Haslinger, R.; Passig, G.; Bahls, T.; Jörg, S.; Nickl, M.; Nothhelfer, A.; Hagn, U.; Hirzinger, G. (2010). "MICA - A new generation of versatile instruments in robotic surgery".
{{cite journal}}: Cite journal requires|journal=(help) - ↑ Seibold, Ulrich; Kuebler, B.; Thielmann, S.; Hirzinger, G. (2009). "Endoscopic 3 DoF-Instrument with 7 DoF Force/Torque Feedback". Workshop Contribution, Presented at ICRA2009, Kobe, Japan.
- ↑ Tobergte, Andreas; Helmer, Patrick; Hagn, Ulrich; Rouiller, Patrice; Thielmann, Sophie; Grange, Sebastien; Albu-Schaffer, Alin; Conti, Francois; Hirzinger, Gerd (2011). "The sigma.7 haptic interface for MiroSurge: A new bi-manual surgical console". 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 3023–3030. doi:10.1109/IROS.2011.6094433. ISBN 978-1-61284-456-5. S2CID 14043211.
- ↑ "sigma.7". Force Dimension. Archived from the original on 2012-04-06.
- ↑ Konietschke, Rainer; Weiss, H.; Ortmaier, T.; Hirzinger, G. (2004). "A Preoperative Planning Procedure for Robotically Assisted Minimally Invasive Interventions".
{{cite journal}}: Cite journal requires|journal=(help) - ↑ Konietschke, Rainer; Bodenmüller, T.; Rink, C.; Schwier, A.; Bäuml, B.; Hirzinger, G. (2011). "Optimal setup of the DLR MiroSurge telerobotic system for minimally invasive surgery". 2011 IEEE International Conference on Robotics and Automation. pp. 3435–3436. doi:10.1109/ICRA.2011.5979616. ISBN 978-1-61284-386-5. S2CID 14220707.
- ↑ Tobergte, Andreas; Konietschke, R.; Hirzinger, G. (2009). "Planning and control of a teleoperation system for research in minimally invasive robotic surgery". 2009 IEEE International Conference on Robotics and Automation. pp. 4225–4232. doi:10.1109/ROBOT.2009.5152512. ISBN 978-1-4244-2788-8. S2CID 15085084.
- ↑ "MiroSurge Robotic Telesurgery System". Gadgetify. 2017-02-16. Retrieved 2017-09-20.
- ↑ "Robot surgeons to operate on beating human hearts". Dezeen. 2013-11-18. Retrieved 2017-09-20.