PAMs were first developed (under the name of McKibben Artificial Muscles) in the 1950s for use in artificial limbs. The Bridgestonerubber company (Japan) commercialized the idea in the 1980s under the name of Rubbertuators.
The retraction strength of the PAM is limited by the sum total strength of individual fibers in the woven shell. The exertion distance is limited by the tightness of the weave; a very loose weave allows greater bulging, which further twists individual fibers in the weave.
One example of a complex configuration of air muscles is the Shadow Dexterous Hand[1] developed by the Shadow Robot Company, which also sells a range of muscles for integration into other projects/systems.[2]
Advantages
PAMs are very lightweight because their main element is a thin membrane. This allows them to be directly connected to the structure they power, which is an advantage when considering the replacement of a defective muscle. If a defective muscle has to be substituted, its location will always be known and its substitution becomes easier. This is an important characteristic, since the membrane is connected to rigid endpoints, which introduces tension concentrations and therefore possible membrane ruptures.
Another advantage of PAMs is their inherent compliant behavior: when a force is exerted on the PAM, it "gives in", without increasing the force in the actuation. This is an important feature when the PAM is used as an actuator in a robot that interacts with a human, or when delicate operations have to be carried out.
In PAMs the force is not only dependent on pressure but also on their state of inflation. This is one of the major advantages; the mathematical model that supports the PAMs functionality is a non-linear system, which makes them much easier [citation needed] than conventional pneumatic cylinder actuators to control precisely. The relationship between force and extension in PAMs mirrors what is seen in the length-tension relationship in biological muscle systems.
The compressibility of the gas is also an advantage since it adds compliance. As with other pneumatic systems PAM actuators usually need electric valves and a compressed air generator.
The loose-weave nature of the outer fiber shell also enables PAMs to be flexible and to mimic biological systems. If the surface fibers are very badly damaged and become unevenly distributed leaving a gap, the internal bladder may inflate through the gap and rupture. As with all pneumatic systems it is important that they are not operated when damaged.
Hydraulic operation
Although the technology is primarily pneumatically (gas) operated, there is nothing that prevents the technology from also being hydraulically (liquid) operated. Using an incompressible fluid increases system rigidity and reduces compliant behavior.
A humanoid robot is a robot resembling the human body in shape. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some humanoid robots may replicate only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.
Pneumatics is a branch of engineering that makes use of gas or pressurized air.
An actuator is a component of a machine that is responsible for moving and controlling a mechanism or system, for example by opening a valve. In simple terms, it is a "mover".
Fluid power is the use of fluids under pressure to generate, control, and transmit power. Fluid power is conventionally subdivided into hydraulics and pneumatics. Although steam is also a fluid, steam power is usually classified separately from fluid power. Compressed-air and water-pressure systems were once used to transmit power from a central source to industrial users over extended geographic areas; fluid power systems today are usually within a single building or mobile machine.
A hydraulic accumulator is a pressure storage reservoir in which an incompressible hydraulic fluid is held under pressure that is applied by an external source of mechanical energy. The external source can be an engine, a spring, a raised weight, or a compressed gas. An accumulator enables a hydraulic system to cope with extremes of demand using a less powerful pump, to respond more quickly to a temporary demand, and to smooth out pulsations. It is a type of energy storage device.
A conventional fixed-wing aircraft flight control system (AFCS) consists of flight control surfaces, the respective cockpit controls, connecting linkages, and the necessary operating mechanisms to control an aircraft's direction in flight. Aircraft engine controls are also considered as flight controls as they change speed.
An electroactive polymer (EAP) is a polymer that exhibits a change in size or shape when stimulated by an electric field. The most common applications of this type of material are in actuators and sensors. A typical characteristic property of an EAP is that they will undergo a large amount of deformation while sustaining large forces.
A linear actuator is an actuator that creates motion in a straight line, in contrast to the circular motion of a conventional electric motor. Linear actuators are used in machine tools and industrial machinery, in computer peripherals such as disk drives and printers, in valves and dampers, and in many other places where linear motion is required. Hydraulic or pneumatic cylinders inherently produce linear motion. Many other mechanisms are used to generate linear motion from a rotating motor.
A control valve is a valve used to control fluid flow by varying the size of the flow passage as directed by a signal from a controller. This enables the direct control of flow rate and the consequential control of process quantities such as pressure, temperature, and liquid level.
The Shadow Dexterous Hand is a humanoid robot hand system developed by The Shadow Robot Company in London. The hand is comparable to a human hand in size and shape, and reproduces all of its degrees of freedom. The Hand is commercially available in pneumatic- and electric-actuated models and currently used in a wide range of institutions including NASA, Bielefeld University and Carnegie Mellon University, and EU research projects such as HANDLE.
Dielectric elastomers (DEs) are smart material systems that produce large strains. They belong to the group of electroactive polymers (EAP). DE actuators (DEA) transform electric energy into mechanical work. They are lightweight and have a high elastic energy density. They have been investigated since the late 1990s. Many prototype applications exist. Every year, conferences are held in the US and Europe.
An MRI robot is a medical robot capable of operating within a magnetic resonance imaging (MRI) scanner for the purpose of performing or assisting in image-guided interventions (IGI).
Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots. Robotics is related to the sciences of electronics, engineering, mechanics, and software.
A powered exoskeleton, also known as power armor, powered armor, powered suit, cybernetic suit, cybernetic armor, exosuit, hardsuit, exoframe or augmented mobility, is a mobile machine that is wearable over all or part of the human body, providing ergonomic structural support and powered by a system of electric motors, pneumatics, levers, hydraulics or a combination of cybernetic technologies, while allowing for sufficient limb movement with increased strength and endurance. The exoskeleton is designed to provide better mechanical load tolerance, and its control system aims to sense and synchronize with the user's intended motion and relay the signal to motors which manage the gears. The exoskeleton also protects the user's shoulder, waist, back and thigh against overload, and stabilizes movements when lifting and holding heavy items.
Artificial muscles, also known as muscle-like actuators, are materials or devices that mimic natural muscle and can change their stiffness, reversibly contract, expand, or rotate within one component due to an external stimulus. The three basic actuation responses– contraction, expansion, and rotation can be combined within a single component to produce other types of motions. Conventional motors and pneumatic linear or rotary actuators do not qualify as artificial muscles, because there is more than one component involved in the actuation.
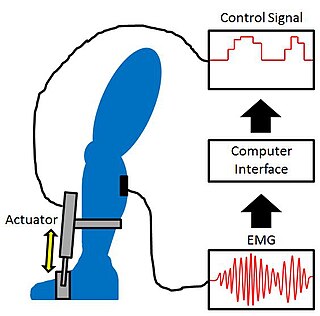
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.
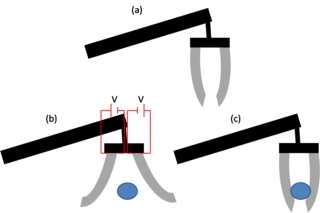
Electrostatic–pneumatic activation is an actuation method for shaping thin membranes for microelectromechanical and microoptoelectromechanical systems. This method benefits from operation at high speed and low power consumption. It can also cause large deflection on thin membranes. Electrostatic-pneumatic MEMS devices usually consist of two membranes with a sealed cavity in between. One membrane calling actuator deflects into cavity by electrostatic pressure to compress air and increase air pressure. Elevated pressure pushes the other membrane and cause dome shape. With direct electrostatic actuation on membrane, a concave shape is achieved.
Soft robotics is a subfield of robotics that concerns the design, control, and fabrication of robots composed of compliant materials, instead of rigid links. In contrast to rigid-bodied robots built from metals, ceramics and hard plastics, the compliance of soft robots can improve their safety when working in close contact with humans.
The term “soft robots” designs a broad class of robotic systems whose architecture includes soft elements, with much higher elasticity than traditional rigid robots. Articulated Soft Robots are robots with both soft and rigid parts, inspired to the muscloloskeletal system of vertebrate animals – from reptiles to birds to mammalians to humans. Compliance is typically concentrated in actuators, transmission and joints while structural stability is provided by rigid or semi-rigid links.
Joseph Laws McKibben was an American physicist and engineer who worked with J. Robert Oppenheimer as a group leader on the Manhattan Project. He personally witnessed the Trinity test and flipped the switch that set off the atomic bomb at Trinity. McKibben, motivated by his daughter Karan's paralysed hands due to polio, also invented the Air Muscle in 1957.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.