
Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.
A hydrophone is a microphone designed for underwater use, for recording or listening to underwater sound. Most hydrophones contains a piezoelectric transducer that generates an electric potential when subjected to a pressure change, such as a sound wave.

Echo sounding or depth sounding is the use of sonar for ranging, normally to determine the depth of water (bathymetry). It involves transmitting acoustic waves into water and recording the time interval between emission and return of a pulse; the resulting time of flight, along with knowledge of the speed of sound in water, allows determining the distance between sonar and target. This information is then typically used for navigation purposes or in order to obtain depths for charting purposes.

Hydrographic survey is the science of measurement and description of features which affect maritime navigation, marine construction, dredging, offshore wind farms, offshore oil exploration and drilling and related activities. Surveys may also be conducted to determine the route of subsea cables such as telecommunications cables, cables associated with wind farms, and HVDC power cables. Strong emphasis is placed on soundings, shorelines, tides, currents, seabed and submerged obstructions that relate to the previously mentioned activities. The term hydrography is used synonymously to describe maritime cartography, which in the final stages of the hydrographic process uses the raw data collected through hydrographic survey into information usable by the end user.
Sound Surveillance System (SOSUS) was the original name for a submarine detection system based on passive sonar developed by the United States Navy to track Soviet submarines. The system's true nature was classified with the name and acronym SOSUS classified as well. The unclassified name Project Caesar was used to cover the installation of the system and a cover story developed regarding the shore stations, identified only as a Naval Facility (NAVFAC), being for oceanographic research. The name changed to Integrated Undersea Surveillance System (IUSS) in 1985, as the fixed bottom arrays were supplemented by the mobile Surveillance Towed Array Sensor System (SURTASS) and other new systems. The commands and personnel were covered by the "oceanographic" term until 1991 when the mission was declassified. As a result, the commands, Oceanographic System Atlantic and Oceanographic System Pacific became Undersea Surveillance Atlantic and Undersea Surveillance Pacific, and personnel were able to wear insignia reflecting the mission.

Bioacoustics is a cross-disciplinary science that combines biology and acoustics. Usually it refers to the investigation of sound production, dispersion and reception in animals. This involves neurophysiological and anatomical basis of sound production and detection, and relation of acoustic signals to the medium they disperse through. The findings provide clues about the evolution of acoustic mechanisms, and from that, the evolution of animals that employ them.
Acoustic homing is the process in which a system uses the sound or acoustic signals of a target or destination to guide a moving object. There are two types of acoustic homing: passive acoustic homing and active acoustic homing. Objects using passive acoustic homing rely on detecting acoustic emissions produced by the target. Conversely, objects using active acoustic homing make use of sonar to emit a signal and detect its reflection off the target. The signal detected is then processed by the system to determine the proper response for the object. Acoustic homing is useful for applications where other forms of navigation and tracking can be ineffective. It is commonly used in environments where radio or GPS signals can not be detected, such as underwater.

A sonobuoy is a small expendable sonar buoy dropped from aircraft or ships for anti-submarine warfare or underwater acoustic research. Sonobuoys are typically around 13 cm (5 in) in diameter and 91 cm (3 ft) long. When floating on the water, sonobuoys have both a radio transmitter above the surface and hydrophone sensors underwater.
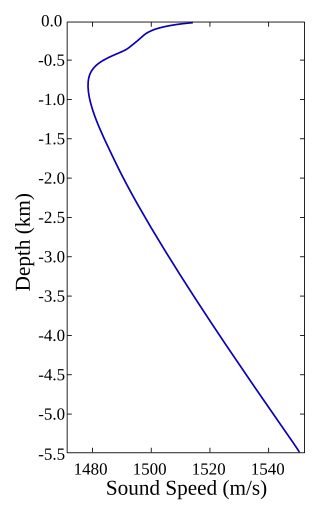
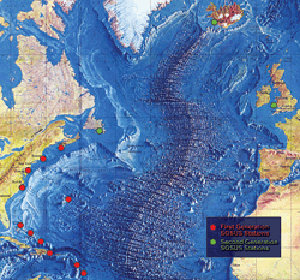
The SOFAR channel, or deep sound channel (DSC), is a horizontal layer of water in the ocean at which depth the speed of sound is at its minimum. The SOFAR channel acts as a waveguide for sound, and low frequency sound waves within the channel may travel thousands of miles before dissipating. An example was reception of coded signals generated by the US Navy-chartered ocean surveillance vessel Cory Chouest off Heard Island, located in the southern Indian Ocean, by hydrophones in portions of all five major ocean basins and as distant as the North Atlantic and North Pacific.

Bloop was an ultra-low-frequency, high amplitude underwater sound detected by the U.S. National Oceanic and Atmospheric Administration (NOAA) in 1997. By 2012, earlier speculation that the sound originated from a marine animal was replaced by NOAA's description of the sound as being consistent with noises generated via non-tectonic cryoseisms originating from glacial movements such as ice calving, or through seabed gouging by ice.

Underwater acoustics is the study of the propagation of sound in water and the interaction of the mechanical waves that constitute sound with the water, its contents and its boundaries. The water may be in the ocean, a lake, a river or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly.

USS Flamingo (AM-32) was a Lapwing-class minesweeper built for the United States Navy near the end of World War I. After service overseas clearing mines after the Armistice, the ship was laid up until 1922 when she was transferred to the United States Department of Commerce for use by the United States Coast and Geodetic Survey. Renamed USC&GS Guide, the ship operated as a survey vessel along the West Coast of the United States for 17 years, making significant contributions to navigation, hydrographic surveying, and oceanography. In June 1941, Guide was transferred back to the Navy, converted into a salvage ship, and renamed USS Viking (ARS-1). As Viking, she worked primarily from bases in California until 1953, when she was sold for scrapping.
Geophysical MASINT is a branch of Measurement and Signature Intelligence (MASINT) that involves phenomena transmitted through the earth and manmade structures including emitted or reflected sounds, pressure waves, vibrations, and magnetic field or ionosphere disturbances.

USC&GS Pioneer was a survey ship that served in the United States Coast and Geodetic Survey from 1922 to 1941. She was the first ship of the Coast and Geodetic Survey to bear the name.
GPS sonobuoy or GPS intelligent buoy (GIB) are a type of inverted long-baseline (LBL) acoustic positioning devices where the transducers are installed on GPS-equipped sonobuoys that are either drifting or moored. GIBs may be used in conjunction with an active underwater device, or with a passive acoustic sound source. Typically the sound source or impact event is tracked or localized using a time of arrival (TOA) technique. Typically several GIBs are deployed over a given area of operation; with the total number determined by the size of the test area and the accuracy of the results desired. Different methods of GPS positioning may be used for positioning the array of GIBs, with accuracies of cm to meter level in realtime possible.

A Fessenden oscillator is an electro-acoustic transducer invented by Reginald Fessenden, with development starting in 1912 at the Submarine Signal Company of Boston. It was the first successful acoustical echo ranging device. Similar in operating principle to a dynamic voice coil loudspeaker, it was an early kind of transducer, capable of creating underwater sounds and of picking up their echoes.

Captain Nicholas Hunter Heck was a career officer of the United States Coast and Geodetic Survey Corps. A leading geophysicist of his time, Heck made important contributions in the study of seismology and oceanography. He also revolutionized hydrographic surveying by developing the wire-drag surveying technique and introduced radio acoustic ranging into Coast and Geodetic Survey hydrography.

Submarine signals had a specific, even proprietary, meaning in the early 20th century. It applied to a navigation aid system developed, patented and produced by the Submarine Signal Company of Boston. The company produced submarine acoustic signals, first bells and receivers then transducers, as aids to navigation. The signals were fixed, associated with lights and other fixed aids, or installed aboard ships enabling warning of fixed hazards or signaling between ships. ATLAS-Werke, at the time Norddeutsche Maschinen und Armaturenfabrik, of Germany also manufactured the equipment under license largely for the European market.
The Missile Impact Location System or Missile Impact Locating System (MILS) is an ocean acoustic system designed to locate the impact position of test missile nose cones at the ocean's surface and then the position of the cone itself for recovery from the ocean bottom. The systems were installed in the missile test ranges managed by the U.S. Air Force.










