
Gas sculpture is a concept introduced by Joan Miró to make sculptures out of gaseous materials. The idea of a gas sculpture also appeared in the book Gog, by Giovanni Papini (1881–1956).
Tensegrity, tensional integrity or floating compression is a structural principle based on a system of isolated components under compression inside a network of continuous tension, and arranged in such a way that the compressed members do not touch each other while the prestressed tensioned members delineate the system spatially.

Interactive art is a form of art that involves the spectator in a way that allows the art to achieve its purpose. Some interactive art installations achieve this by letting the observer walk through, over or around them; others ask the artist or the spectators to become part of the artwork in some way.
An actuator is a component of a machine that produces force, torque, or displacement, when an electrical, pneumatic or hydraulic input is supplied to it in a system. The effect is usually produced in a controlled way. An actuator translates such an input signal into the required form of mechanical energy. It is a type of transducer. In simple terms, it is a "mover".
Information art, which is also known as informatism or data art, is an art form that is inspired by and principally incorporates data, computer science, information technology, artificial intelligence, and related data-driven fields. The information revolution has resulted in over-abundant data that are critical in a wide range of areas, from the Internet to healthcare systems. Related to conceptual art, electronic art and new media art, informatism considers this new technological, economical, and cultural paradigm shift, such that artworks may provide social commentaries, synthesize multiple disciplines, and develop new aesthetics. Realization of information art often take, although not necessarily, interdisciplinary and multidisciplinary approaches incorporating visual, audio, data analysis, performance, and others. Furthermore, physical and virtual installations involving informatism often provide human-computer interaction that generate artistic contents based on the processing of large amounts of data.
In metallurgy, a shape-memory alloy (SMA) is an alloy that can be deformed when cold but returns to its pre-deformed ("remembered") shape when heated. It is also known in other names such as memory metal, memory alloy, smart metal, smart alloy, and muscle wire. The "memorized geometry" can be modified by fixating the desired geometry and subjecting it to a thermal treatment, for example a wire can be taught to memorize the shape of a coil spring.

Dario Floreano is a Swiss-Italian roboticist and engineer. He is Director of the Laboratory of Intelligent System (LIS) at the École Polytechnique Fédérale de Lausanne in Switzerland and was the founding director of the Swiss National Centre of Competence in Research (NCCR) Robotics.
An active structure is a mechanical structure with the ability to alter its configuration, form or properties in response to changes in the environment.

Motion control is a sub-field of automation, encompassing the systems or sub-systems involved in moving parts of machines in a controlled manner. Motion control systems are extensively used in a variety of fields for automation purposes, including precision engineering, micromanufacturing, biotechnology, and nanotechnology. The main components involved typically include a motion controller, an energy amplifier, and one or more prime movers or actuators. Motion control may be open loop or closed loop. In open loop systems, the controller sends a command through the amplifier to the prime mover or actuator, and does not know if the desired motion was actually achieved. Typical systems include stepper motor or fan control. For tighter control with more precision, a measuring device may be added to the system. When the measurement is converted to a signal that is sent back to the controller, and the controller compensates for any error, it becomes a Closed loop System.
Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.
Adaptable Robotics refers to a field of robotics with a focus on creating robotic systems capable of adjusting their hardware and software components to perform a wide range of tasks while adapting to varying environments. The 1960s introduced robotics into the industrial field. Since then, the need to make robots with new forms of actuation, adaptability, sensing and perception, and even the ability to learn stemmed the field of adaptable robotics. Significant developments such as the PUMA robot, manipulation research, soft robotics, swarm robotics, AI, cobots, bio-inspired approaches, and more ongoing research have advanced the adaptable robotics field tremendously. Adaptable robots are usually associated with their development kit, typically used to create autonomous mobile robots. In some cases, an adaptable kit will still be functional even when certain components break.

Kinetic architecture is a concept through which buildings are designed to allow parts of the structure to move, without reducing overall structural integrity.

Robotics is the interdisciplinary study and practice of the design, construction, operation, and use of robots.
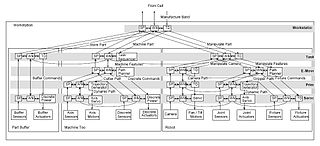
Real-time Control System (RCS) is a reference model architecture, suitable for many software-intensive, real-time computing control problem domains. It defines the types of functions needed in a real-time intelligent control system, and how these functions relate to each other.
Smart polymers, stimuli-responsive polymers or functional polymers are high-performance polymers that change according to the environment they are in.

Generative design is an iterative design process that uses software to generate outputs that fulfill a set of constraints iteratively adjusted by a designer. Whether a human, test program, or artificial intelligence, the designer algorithmically or manually refines the feasible region of the program's inputs and outputs with each iteration to fulfill evolving design requirements. By employing computing power to evaluate more design permutations than a human alone is capable of, the process is capable of producing an optimal design that mimics nature's evolutionary approach to design through genetic variation and selection. The output can be images, sounds, architectural models, animation, and much more. It is, therefore, a fast method of exploring design possibilities that is used in various design fields such as art, architecture, communication design, and product design.

In building engineering, a climate-adaptive building shell (CABS) is a facade or roof that interacts with the variability of its environment in a dynamic way. Conventional structures have static building envelopes and therefore cannot act in response to changing weather conditions and occupant requirements. Well-designed CABS have two main functions: they contribute to energy-saving for heating, cooling, ventilation, and lighting, and they induce a positive impact on the indoor environmental quality of buildings.
Interactive architecture refers to the branch of architecture which deals with buildings, structures, surfaces and spaces that are designed to change, adapt and reconfigure in real-time response to people, as well as the wider environment. This is usually achieved by embedding sensors, processors and effectors as a core part of a building's nature and functioning in such a way that the form, structure, mood or program of a space can be altered in real-time. Interactive architecture encompasses building automation but goes beyond it by including forms of interaction engagements and responses that may lie in pure communication purposes as well as in the emotive and artistic realm, thus entering the field of interactive art. It is also closely related to the field of Responsive architecture and the terms are sometimes used interchangeably, but the distinction is important for some.
The term “soft robots” designs a broad class of robotic systems whose architecture includes soft elements, with much higher elasticity than traditional rigid robots. Articulated Soft Robots are robots with both soft and rigid parts, inspired to the muscloloskeletal system of vertebrate animals – from reptiles to birds to mammalians to humans. Compliance is typically concentrated in actuators, transmission and joints while structural stability is provided by rigid or semi-rigid links.


