Related Research Articles
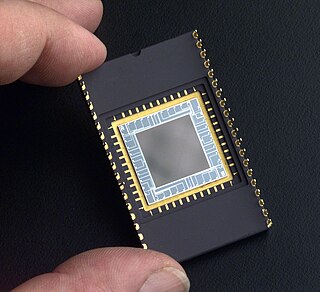
A charge-coupled device (CCD) is an integrated circuit containing an array of linked, or coupled, capacitors. Under the control of an external circuit, each capacitor can transfer its electric charge to a neighboring capacitor. CCD sensors are a major technology used in digital imaging.

The ecoSCOPE is an optical sensor system, deployed from a small remotely operated vehicle (ROV) or fibre optic cable, to investigate behavior and microdistribution of small organisms in the ocean.

A remotely operated underwater vehicle (ROUV) or remotely operated vehicle (ROV) is a free-swimming submersible craft used to perform underwater observation, inspection and physical tasks such as valve operations, hydraulic functions and other general tasks within the subsea oil and gas industry, military, scientific and other applications. ROVs can also carry tooling packages for undertaking specific tasks such as pull-in and connection of flexible flowlines and umbilicals, and component replacement.

A video camera is an optical instrument that captures videos, as opposed to a movie camera, which records images on film. Video cameras were initially developed for the television industry but have since become widely used for a variety of other purposes.

A data logger is an electronic device that records data over time or about location either with a built-in instrument or sensor or via external instruments and sensors. Increasingly, but not entirely, they are based on a digital processor, and called digital data loggers (DDL). They generally are small, battery-powered, portable, and equipped with a microprocessor, internal memory for data storage, and sensors. Some data loggers interface with a personal computer and use software to activate the data logger and view and analyze the collected data, while others have a local interface device and can be used as a stand-alone device.
A spectroradiometer is a light measurement tool that is able to measure both the wavelength and amplitude of the light emitted from a light source. Spectrometers discriminate the wavelength based on the position the light hits at the detector array allowing the full spectrum to be obtained with a single acquisition. Most spectrometers have a base measurement of counts which is the un-calibrated reading and is thus impacted by the sensitivity of the detector to each wavelength. By applying a calibration, the spectrometer is then able to provide measurements of spectral irradiance, spectral radiance and/or spectral flux. This data is also then used with built in or PC software and numerous algorithms to provide readings or Irradiance (W/cm2), Illuminance, Radiance (W/sr), Luminance (cd), Flux, Chromaticity, Color Temperature, Peak and Dominant Wavelength. Some more complex spectrometer software packages also allow calculation of PAR μmol/m2/s, Metamerism, and candela calculations based on distance and include features like 2- and 20-degree observer, baseline overlay comparisons, transmission and reflectance.

An underwater glider is a type of autonomous underwater vehicle (AUV) that employs variable-buoyancy propulsion instead of traditional propellers or thrusters. It employs variable buoyancy in a similar way to a profiling float, but unlike a float, which can move only up and down, an underwater glider is fitted with hydrofoils that allow it to glide forward while descending through the water. At a certain depth, the glider switches to positive buoyancy to climb back up and forward, and the cycle is then repeated.

Dr. Fred Noel Spiess was a naval officer, oceanographer and marine explorer. His work created new advances in marine technology including the FLIP Floating Instrument Platform, the Deep Tow vehicle for study of the seafloor, and the use of acoustics for underwater navigation and geodetic positioning.
The Intel Play product line, developed and jointly marketed by Intel and Mattel, was a product line of consumer "toy" electronic devices. The other toys were the Digital Movie Creator, the Computer Sound Morpher, and the Me2Cam.

A digital microscope is a variation of a traditional optical microscope that uses optics and a digital camera to output an image to a monitor, sometimes by means of software running on a computer. A digital microscope often has its own in-built LED light source, and differs from an optical microscope in that there is no provision to observe the sample directly through an eyepiece. Since the image is focused on the digital circuit, the entire system is designed for the monitor image. The optics for the human eye are omitted.

The Continuous Plankton Recorder (CPR) Survey is one of the longest running marine biological monitoring programmes in the world. Started in 1931 by Sir Alister Hardy and Sir Cyril Lucas, the Survey provides marine scientists and policy-makers with measures of plankton communities, coupled with ocean physical, biological and chemical observations, on a pan-oceanic scale. The Survey is a globally recognised leader on the impacts of environmental change on the health of our oceans.

The Australian Continuous Plankton Recorder (AusCPR) survey is a joint project of the CSIRO and the Australian Antarctic Division, DEWHA, to monitor plankton communities as a guide to the health of Australia's oceans.

The SCARSouthern Ocean Continuous Plankton Recorder (SO-CPR) Survey was established in 1991 by the Australian Antarctic Division,of Environment, Water Heritage and the Arts, to map the spatial-temporal patterns of zooplankton and then to use the sensitivity of plankton to environmental change as early warning indicators of the health of the Southern Ocean. It also serves as reference for other Southern Ocean and Antarctic monitoring programs.

A benthic lander is an autonomous observational platform that sits on the seabed or benthic zone to record physical, chemical or biological activity.
The Hawaii Ocean Time-series (HOT) program is a long-term oceanographic study based at the University of Hawaii at Manoa. In 2015, the American Society for Microbiology designated the HOT Program's field site Station ALOHA a "Milestone in Microbiology", for playing "a key role in defining the discipline of microbial oceanography and educating the public about the vital role of marine microbes in global ecosystems."

A cabled observatory is a seabed oceanographic research platform connected to land by cables that provide power and communication. Observatories are outfitted with a multitude of scientific instruments that can collect many kinds of data from the seafloor and water column. By removing the limitations of undersea power sources and sonar or RF communications, cabled observatories allow persistent study of underwater phenomena. Data from these instruments is relayed to a land station and data networks, such as Ocean Networks Canada, in real time.

EVNautilus is a 68-meter (223 ft) research vessel owned by the Ocean Exploration Trust under the direction of Robert Ballard, the researcher known for finding the wreck of the Titanic and the German battleship Bismarck. The vessel's home port is at the AltaSea facility in San Pedro in the Port of Los Angeles, California. Nautilus is equipped with a team of remotely operated vehicles (ROVs), Hercules, Argus, Little Hercules, and Atalanta, a multibeam mapping system, and mapping tools Diana and Echo, allowing it to conduct deep sea exploration of the ocean to a depth of 4,000 meters (13,000 ft).

JS Shōnan (AGS-5106) is the only ship of her type of oceanographic research ship for the Japan Maritime Self-Defense Force.
An underwater survey is a survey performed in an underwater environment or conducted remotely on an underwater object or region. Survey can have several meanings. The word originates in Medieval Latin with meanings of looking over and detailed study of a subject. One meaning is the accurate measurement of a geographical region, usually with the intention of plotting the positions of features as a scale map of the region. This meaning is often used in scientific contexts, and also in civil engineering and mineral extraction. Another meaning, often used in a civil, structural, or marine engineering context, is the inspection of a structure or vessel to compare actual condition with the specified nominal condition, usually with the purpose of reporting on the actual condition and compliance with, or deviations from, the nominal condition, for quality control, damage assessment, valuation, insurance, maintenance, and similar purposes. In other contexts it can mean inspection of a region to establish presence and distribution of specified content, such as living organisms, either to establish a baseline, or to compare with a baseline.

Underwater exploration is the exploration of any underwater environment, either by direct observation by the explorer, or by remote observation and measurement under the direction of the investigators. Systematic, targeted exploration is the most effective method to increase understanding of the ocean and other underwater regions, so they can be effectively managed, conserved, regulated, and their resources discovered, accessed, and used. Less than 10% of the ocean has been mapped in any detail, less has been visually observed, and the total diversity of life and distribution of populations is similarly obscure.
References
- ↑ Benfield, M.C., et al Video Plankton Recorder estimates of copepod, Pteropod and larvacean distributions from a stratified region of Georges Bank with comparative measurements from a MOCNESS sampler. Deep-Sea Research Part II: Topical Studies in Oceanography, 1996. 43(7-8): p. 1925-1945
- ↑ Anonymous. Video Plankton Recorder (VPR). 2010 [cited 2010 10/25/2010]; Available from: http://www.whoi.edu/instruments/viewInstrument.do?id=1007#1034.
- ↑ Cabell, D. and G. Scott. The Video Plankton Recorder. 1993; 3:[Available from:
- ↑ Davis, C.S., et al., A three-axis fast-tow digital video plankton recorder for rapid surveys of plankton taxa and hydrography. Limnology and Oceanography: Methods, 2005. 3(FEB.): p. 59-74.
- ↑ Benfield, M.C., et al., RAPID Research on Automated Plankton Identification. Oceanography, 2007. 20(2): p. 172-187.