In mathematics, particularly in the area of abstract algebra known as group theory, a characteristic subgroup is a subgroup that is mapped to itself by every automorphism of the parent group. Because every conjugation map is an inner automorphism, every characteristic subgroup is normal; though the converse is not guaranteed. Examples of characteristic subgroups include the commutator subgroup and the center of a group.
In mathematics, more specifically in abstract algebra, the commutator subgroup or derived subgroup of a group is the subgroup generated by all the commutators of the group.

In mathematics, an endomorphism is a morphism from a mathematical object to itself. An endomorphism that is also an isomorphism is an automorphism. For example, an endomorphism of a vector space V is a linear map f: V → V, and an endomorphism of a group G is a group homomorphism f: G → G. In general, we can talk about endomorphisms in any category. In the category of sets, endomorphisms are functions from a set S to itself.
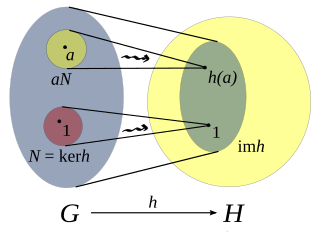
In mathematics, given two groups, (G,∗) and (H, ·), a group homomorphism from (G,∗) to (H, ·) is a function h : G → H such that for all u and v in G it holds that
In abstract algebra, a group isomorphism is a function between two groups that sets up a bijection between the elements of the groups in a way that respects the given group operations. If there exists an isomorphism between two groups, then the groups are called isomorphic. From the standpoint of group theory, isomorphic groups have the same properties and need not be distinguished.

In the mathematical field of representation theory, group representations describe abstract groups in terms of bijective linear transformations of a vector space to itself ; in particular, they can be used to represent group elements as invertible matrices so that the group operation can be represented by matrix multiplication.

In mathematics, many sets of transformations form a group under function composition; for example, the rotations around a point in the plane. It is often useful to consider the group as an abstract group, and to say that one has a group action of the abstract group that consists of performing the transformations of the group of transformations. The reason for distinguishing the group from the transformations is that, generally, a group of transformations of a structure acts also on various related structures; for example, the above rotation group acts also on triangles by transforming triangles into triangles.
In algebra, a homomorphism is a structure-preserving map between two algebraic structures of the same type. The word homomorphism comes from the Ancient Greek language: ὁμός meaning "same" and μορφή meaning "form" or "shape". However, the word was apparently introduced to mathematics due to a (mis)translation of German ähnlich meaning "similar" to ὁμός meaning "same". The term "homomorphism" appeared as early as 1892, when it was attributed to the German mathematician Felix Klein (1849–1925).

In mathematics, an isomorphism is a structure-preserving mapping between two structures of the same type that can be reversed by an inverse mapping. Two mathematical structures are isomorphic if an isomorphism exists between them. The word isomorphism is derived from the Ancient Greek: ἴσοςisos "equal", and μορφήmorphe "form" or "shape".
In mathematics, specifically in group theory, the concept of a semidirect product is a generalization of a direct product. There are two closely related concepts of semidirect product:
In mathematics, rings are algebraic structures that generalize fields: multiplication need not be commutative and multiplicative inverses need not exist. Informally, a ring is a set equipped with two binary operations satisfying properties analogous to those of addition and multiplication of integers. Ring elements may be numbers such as integers or complex numbers, but they may also be non-numerical objects such as polynomials, square matrices, functions, and power series.
In abstract algebra an inner automorphism is an automorphism of a group, ring, or algebra given by the conjugation action of a fixed element, called the conjugating element. They can be realized via simple operations from within the group itself, hence the adjective "inner". These inner automorphisms form a subgroup of the automorphism group, and the quotient of the automorphism group by this subgroup is defined as the outer automorphism group.

In mathematics, the adjoint representation of a Lie group G is a way of representing the elements of the group as linear transformations of the group's Lie algebra, considered as a vector space. For example, if G is , the Lie group of real n-by-n invertible matrices, then the adjoint representation is the group homomorphism that sends an invertible n-by-n matrix to an endomorphism of the vector space of all linear transformations of defined by: .
In mathematics, Schur's lemma is an elementary but extremely useful statement in representation theory of groups and algebras. In the group case it says that if M and N are two finite-dimensional irreducible representations of a group G and φ is a linear map from M to N that commutes with the action of the group, then either φ is invertible, or φ = 0. An important special case occurs when M = N, i.e. φ is a self-map; in particular, any element of the center of a group must act as a scalar operator on M. The lemma is named after Issai Schur who used it to prove the Schur orthogonality relations and develop the basics of the representation theory of finite groups. Schur's lemma admits generalisations to Lie groups and Lie algebras, the most common of which are due to Jacques Dixmier and Daniel Quillen.
In mathematics, in the subfield of geometric topology, the mapping class group is an important algebraic invariant of a topological space. Briefly, the mapping class group is a certain discrete group corresponding to symmetries of the space.
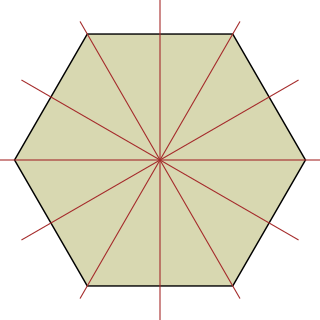
Symmetry occurs not only in geometry, but also in other branches of mathematics. Symmetry is a type of invariance: the property that a mathematical object remains unchanged under a set of operations or transformations.
Representation theory is a branch of mathematics that studies abstract algebraic structures by representing their elements as linear transformations of vector spaces, and studies modules over these abstract algebraic structures. In essence, a representation makes an abstract algebraic object more concrete by describing its elements by matrices and their algebraic operations. The theory of matrices and linear operators is well-understood, so representations of more abstract objects in terms of familiar linear algebra objects helps glean properties and sometimes simplify calculations on more abstract theories.
In mathematics, particularly in category theory, a morphism is a structure-preserving map from one mathematical structure to another one of the same type. The notion of morphism recurs in much of contemporary mathematics. In set theory, morphisms are functions; in linear algebra, linear transformations; in group theory, group homomorphisms; in analysis and topology, continuous functions, and so on.
In mathematics, the automorphism group of an object X is the group consisting of automorphisms of X under composition of morphisms. For example, if X is a finite-dimensional vector space, then the automorphism group of X is the group of invertible linear transformations from X to itself. If instead X is a group, then its automorphism group is the group consisting of all group automorphisms of X.
In abstract algebra, an automorphism of a Lie algebra is an isomorphism from to itself, that is, a bijective linear map preserving the Lie bracket. The set of automorphisms of are denoted , the automorphism group of .












