Related Research Articles
In computer science, mutual exclusion is a property of concurrency control, which is instituted for the purpose of preventing race conditions. It is the requirement that one thread of execution never enters a critical section while a concurrent thread of execution is already accessing said critical section, which refers to an interval of time during which a thread of execution accesses a shared resource or shared memory.
Thread safety is a computer programming concept applicable to multi-threaded code. Thread-safe code only manipulates shared data structures in a manner that ensures that all threads behave properly and fulfill their design specifications without unintended interaction. There are various strategies for making thread-safe data structures.
Processor affinity, or CPU pinning or "cache affinity", enables the binding and unbinding of a process or a thread to a central processing unit (CPU) or a range of CPUs, so that the process or thread will execute only on the designated CPU or CPUs rather than any CPU. This can be viewed as a modification of the native central queue scheduling algorithm in a symmetric multiprocessing operating system. Each item in the queue has a tag indicating its kin processor. At the time of resource allocation, each task is allocated to its kin processor in preference to others.
In computer science, a lock or mutex is a synchronization primitive: a mechanism that enforces limits on access to a resource when there are many threads of execution. A lock is designed to enforce a mutual exclusion concurrency control policy, and with a variety of possible methods there exists multiple unique implementations for different applications.
In software engineering, a spinlock is a lock that causes a thread trying to acquire it to simply wait in a loop ("spin") while repeatedly checking whether the lock is available. Since the thread remains active but is not performing a useful task, the use of such a lock is a kind of busy waiting. Once acquired, spinlocks will usually be held until they are explicitly released, although in some implementations they may be automatically released if the thread being waited on blocks or "goes to sleep".
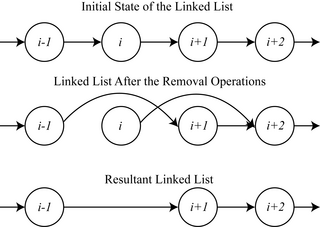
In computer science, read-copy-update (RCU) is a synchronization mechanism that avoids the use of lock primitives while multiple threads concurrently read and update elements that are linked through pointers and that belong to shared data structures.

In computer science, the dining philosophers problem is an example problem often used in concurrent algorithm design to illustrate synchronization issues and techniques for resolving them.
In computer science, the test-and-set instruction is an instruction used to write (set) 1 to a memory location and return its old value as a single atomic operation. The caller can then "test" the result to see if the state was changed by the call. If multiple processes may access the same memory location, and if a process is currently performing a test-and-set, no other process may begin another test-and-set until the first process's test-and-set is finished. A central processing unit (CPU) may use a test-and-set instruction offered by another electronic component, such as dual-port RAM; a CPU itself may also offer a test-and-set instruction.
In computer science, compare-and-swap (CAS) is an atomic instruction used in multithreading to achieve synchronization. It compares the contents of a memory location with a given value and, only if they are the same, modifies the contents of that memory location to a new given value. This is done as a single atomic operation. The atomicity guarantees that the new value is calculated based on up-to-date information; if the value had been updated by another thread in the meantime, the write would fail. The result of the operation must indicate whether it performed the substitution; this can be done either with a simple boolean response, or by returning the value read from the memory location.
In computing, POSIX Threads, commonly known as pthreads, is an execution model that exists independently from a programming language, as well as a parallel execution model. It allows a program to control multiple different flows of work that overlap in time. Each flow of work is referred to as a thread, and creation and control over these flows is achieved by making calls to the POSIX Threads API. POSIX Threads is an API defined by the Institute of Electrical and Electronics Engineers (IEEE) standard POSIX.1c, Threads extensions .
In concurrent programming, a monitor is a synchronization construct that allows threads to have both mutual exclusion and the ability to wait (block) for a certain condition to become false. Monitors also have a mechanism for signaling other threads that their condition has been met. A monitor consists of a mutex (lock) object and condition variables. A condition variable is essentially a container of threads that are waiting for a certain condition. Monitors provide a mechanism for threads to temporarily give up exclusive access in order to wait for some condition to be met, before regaining exclusive access and resuming their task.
In computer science, a ticket lock is a synchronization mechanism, or locking algorithm, that is a type of spinlock that uses "tickets" to control which thread of execution is allowed to enter a critical section.
In computing, sigaction is a function API defined by POSIX to give the programmer access to what should be a program's behavior when receiving specific OS signals.
Process Contention Scope is one of the two basic ways of scheduling threads. Both of them being: process local scheduling and system global scheduling. These scheduling classes are known as the scheduling contention scope, and are defined only in POSIX. Process contention scope scheduling means that all of the scheduling mechanism for the thread is local to the process—the thread's library has full control over which thread will be scheduled on an LWP. This also implies the use of either the Many- to-One or Many-to-Many model.
In computer science, synchronization is the task of coordinating multiple of processes to join up or handshake at a certain point, in order to reach an agreement or commit to a certain sequence of action.

Sun Microsystems' UltraSPARC T2 microprocessor is a multithreading, multi-core CPU. It is a member of the SPARC family, and the successor to the UltraSPARC T1. The chip is sometimes referred to by its codename, Niagara 2. Sun started selling servers with the T2 processor in October 2007.
In computer science, a fiber is a particularly lightweight thread of execution.

CPU time is the amount of time for which a central processing unit (CPU) was used for processing instructions of a computer program or operating system, as opposed to elapsed time, which includes for example, waiting for input/output (I/O) operations or entering low-power (idle) mode. The CPU time is measured in clock ticks or seconds. Often, it is useful to measure CPU time as a percentage of the CPU's capacity, which is called the CPU usage. CPU time and CPU usage have two main uses.
In computing, the producer-consumer problem is a family of problems described by Edsger W. Dijkstra since 1965.
Logical Domains is the server virtualization and partitioning technology for SPARC V9 processors. It was first released by Sun Microsystems in April 2007. After the Oracle acquisition of Sun in January 2010, the product has been re-branded as Oracle VM Server for SPARC from version 2.0 onwards.
References
- ↑ "Intel Turbo Boost Technology".
- ↑ "Why the 'volatile' type class should not be used". Archived from the original on 2017-10-04. Retrieved 2013-06-10.