Related Research Articles
Time and frequency transfer is a scheme where multiple sites share a precise reference time or frequency. The technique is commonly used for creating and distributing standard time scales such as International Atomic Time (TAI). Time transfer solves problems such as astronomical observatories correlating observed flashes or other phenomena with each other, as well as cell phone towers coordinating handoffs as a phone moves from one cell to another.
The Network Time Protocol (NTP) is a networking protocol for clock synchronization between computer systems over packet-switched, variable-latency data networks. In operation since before 1985, NTP is one of the oldest Internet protocols in current use. NTP was designed by David L. Mills of the University of Delaware.

DCF77 is a German longwave time signal and standard-frequency radio station. It started service as a standard-frequency station on 1 January 1959. In June 1973 date and time information was added. Its primary and backup transmitter are located at 50°0′56″N9°00′39″E in Mainflingen, about 25 km south-east of Frankfurt am Main, Germany. The transmitter generates a nominal power of 50 kW, of which about 30 to 35 kW can be radiated via a T-antenna.

A wireless mesh network (WMN) is a communications network made up of radio nodes organized in a mesh topology. It can also be a form of wireless ad hoc network.
A time server is a server computer that reads the actual time from a reference clock and distributes this information to its clients using a computer network. The time server may be a local network time server or an internet time server.

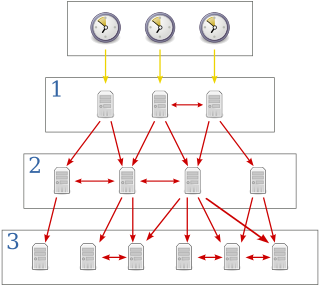
A clock network or clock system is a set of synchronized clocks designed to always show exactly the same time by communicating with each other. Clock networks usually consist of a central master clock kept in sync with an official time source, and one or more slave clocks which receive and display the time from the master.

OpenNTPD is a Unix daemon implementing the Network Time Protocol to synchronize the local clock of a computer system with remote NTP servers. It is also able to act as an NTP server to NTP-compatible clients.
The Precision Time Protocol (PTP) is a protocol used to synchronize clocks throughout a computer network. On a local area network, it achieves clock accuracy in the sub-microsecond range, making it suitable for measurement and control systems. PTP is employed to synchronize financial transactions, mobile phone tower transmissions, sub-sea acoustic arrays, and networks that require precise timing but lack access to satellite navigation signals.
A pulse per second is an electrical signal that has a width of less than one second and a sharply rising or abruptly falling edge that accurately repeats once per second. PPS signals are output by radio beacons, frequency standards, other types of precision oscillators and some GPS receivers. Precision clocks are sometimes manufactured by interfacing a PPS signal generator to processing equipment that aligns the PPS signal to the UTC second and converts it to a useful display. Atomic clocks usually have an external PPS output, although internally they may operate at 9,192,631,770 Hz. PPS signals have an accuracy ranging from a 12 picoseconds to a few microseconds per second, or 2.0 nanoseconds to a few milliseconds per day based on the resolution and accuracy of the device generating the signal.

A phasor measurement unit (PMU) is a device used to estimate the magnitude and phase angle of an electrical phasor quantity in the electricity grid using a common time source for synchronization. Time synchronization is usually provided by GPS or IEEE 1588 Precision Time Protocol, which allows synchronized real-time measurements of multiple remote points on the grid. PMUs are capable of capturing samples from a waveform in quick succession and reconstructing the phasor quantity, made up of an angle measurement and a magnitude measurement. The resulting measurement is known as a synchrophasor. These time synchronized measurements are important because if the grid’s supply and demand are not perfectly matched, frequency imbalances can cause stress on the grid, which is a potential cause for power outages.
Cristian's algorithm is a method for clock synchronization which can be used in many fields of distributive computer science but is primarily used in low-latency intranets. Cristian observed that this simple algorithm is probabilistic, in that it only achieves synchronization if the round-trip time (RTT) of the request is short compared to required accuracy. It also suffers in implementations using a single server, making it unsuitable for many distributive applications where redundancy may be crucial.
Reference Broadcast Synchronization (RBS) is a synchronization method in which the receiver uses the physical layer broadcasts for comparing the clocks. This slightly differs from traditional methods which synchronize the sender's with the receiver's clock.
Synchronous Ethernet, also referred as SyncE, is an ITU-T standard for computer networking that facilitates the transference of clock signals over the Ethernet physical layer. This signal can then be made traceable to an external clock.
Two independent clocks, once synchronized, will walk away from one another without limit. To have them display the same time it would be necessary to re-synchronize them at regular intervals. The period between synchronizations is referred to as holdover and performance under holdover relies on the quality of the reference oscillator, the PLL design, and the correction mechanisms employed.

A GPS clock, or GPS disciplined oscillator (GPSDO), is a combination of a GPS receiver and a high-quality, stable oscillator such as a quartz or rubidium oscillator whose output is controlled to agree with the signals broadcast by GPS or other GNSS satellites. GPSDOs work well as a source of timing because the satellite time signals must be accurate in order to provide positional accuracy for GPS in navigation. These signals are accurate to nanoseconds and provide a good reference for timing applications.
White Rabbit is the name of a collaborative project including CERN, GSI Helmholtz Centre for Heavy Ion Research and other partners from universities and industry to develop a fully deterministic Ethernet-based network for general purpose data transfer and sub-nanosecond accuracy time transfer. Its initial use was as a timing distribution network for control and data acquisition timing of the accelerator sites at CERN as well as in GSI's Facility for Antiproton and Ion Research (FAIR) project. The hardware designs as well as the source code are publicly available. The name of the project is a reference to the White Rabbit appearing in Lewis Carroll's novel Alice's Adventures in Wonderland.
The Reference Broadcast Infrastructure Synchronization (RBIS) protocol is a master/slave synchronization protocol. RBIS, as the Reference Broadcast Time Synchronization (RBS), is a receiver/receiver synchronization protocol, as a consequence timestamps used for clock regulation are acquired only on the receiving of synchronization events. RBIS is specifically tailored to be used in IEEE 802.11 Wi-Fi networks configured in infrastructure mode. Such a kind of networks are based on an access point that coordinates the communication between the wireless nodes, and they are very common.
Industrial automation systems consisting of several distributed controllers need a precise synchronization for commands, events and process data. For instance, motors for newspaper printing are synchronized within some 5 microseconds to ensure that the color pixels in the different cylinders come within 0.1 mm at a paper speed of some 20 m/s. Similar requirements exist in high-power semiconductors and in drive-by-wire vehicles. This synchronisation is provided by the communication network, in most cases Industrial Ethernet. Many ad-hoc synchronization schemes exist, so IEEE published a standard Precision Time Protocol IEEE 1588 or "PTP", which allows sub-microsecond synchronization of clocks. PTP is formulated generally, so concrete applications need a stricter profile. In particular, PTP does not specify how the clocks should operate when the network is duplicated for better resilience to failures.
Deterministic Networking (DetNet) is an effort by the IETF DetNet Working Group to study implementation of deterministic data paths for real-time applications with extremely low data loss rates, packet delay variation (jitter), and bounded latency, such as audio and video streaming, industrial automation, and vehicle control.
References
- ↑ Tanenbaum, Andrew S.; van Steen, Maarten (2002), Distributed Systems : Principles and Paradigms, Prentice Hall, ISBN 0-13-088893-1
- ↑ Norman Matloff (September 3, 2001), Transmission on a Serial Line (PDF), retrieved 2018-04-17
- ↑ Marco Platania (2018-06-03). "Clock Synchronization" (PDF). p. 11.
- 1 2 Maróti, Miklós; Kusy, Branislav; Simon, Gyula; Lédeczi, Ákos (2004). "The flooding time synchronization protocol". Proceedings of the 2nd international conference on Embedded networked sensor systems. SenSys '04. New York, NY, USA: ACM. pp. 39–49. doi:10.1145/1031495.1031501. ISBN 1581138792. S2CID 9897231.
- 1 2 Koo, Jinkyu; Panta, Rajesh K.; Bagchi, Saurabh; Montestruque, Luis (2009). "A tale of two synchronizing clocks". Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems. SenSys '09. New York, NY, USA: ACM. pp. 239–252. doi:10.1145/1644038.1644062. ISBN 9781605585192. S2CID 8242938.
- ↑ Rentel, Carlos H.; Kunz, Thomas (March 2005), "A clock-sampling mutual network synchronization algorithm for wireless ad hoc networks", IEEE Wireless Communications and Networking Conference, IEEE Press, 1: 638–644, doi:10.1109/WCNC.2005.1424575, S2CID 1340072
- ↑ Cristian, F. (1989), "Probabilistic clock synchronization", Distributed Computing, Springer, 3 (3): 146–158, doi:10.1007/BF01784024, S2CID 3170166
- ↑ "Common View GPS Time Transfer". National Institute of Standards and Technology. Archived from the original on 2012-10-28.
- ↑ Josh Matson (May 2013). "Choosing the correct Time Synchronization Protocol and incorporating the 1756-TIME module into your Application" (PDF). Rockwell Automation. Retrieved 2019-08-13.
- ↑ Cena, G.; Scanzio, S.; Valenzano, A.; Zunino, C. (June 2015), "Implementation and Evaluation of the Reference Broadcast Infrastructure Synchronization Protocol", IEEE Transactions on Industrial Informatics, IEEE Press, 11 (3): 801–811, doi:10.1109/TII.2015.2396003, S2CID 17867070
- ↑ Exploiting a Natural Network Effect for Scalable, Fine-grained Clock Synchronization. 2018. pp. 81–94. ISBN 9781939133014.
- ↑ John Markoff (June 29, 2018). "Time Split to the Nanosecond Is Precisely What Wall Street Wants". New York Times.