In differential geometry, a subject of mathematics, a symplectic manifold is a smooth manifold, , equipped with a closed nondegenerate differential 2-form , called the symplectic form. The study of symplectic manifolds is called symplectic geometry or symplectic topology. Symplectic manifolds arise naturally in abstract formulations of classical mechanics and analytical mechanics as the cotangent bundles of manifolds. For example, in the Hamiltonian formulation of classical mechanics, which provides one of the major motivations for the field, the set of all possible configurations of a system is modeled as a manifold, and this manifold's cotangent bundle describes the phase space of the system.
In mathematics, a Lie algebroid is a vector bundle together with a Lie bracket on its space of sections and a vector bundle morphism , satisfying a Leibniz rule. A Lie algebroid can thus be thought of as a "many-object generalisation" of a Lie algebra.
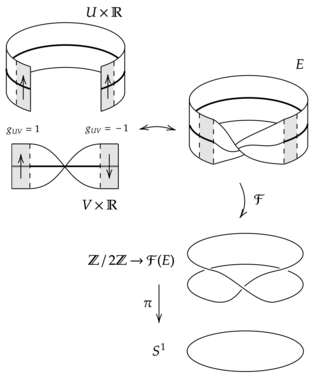
In mathematics, a frame bundle is a principal fiber bundle F(E) associated to any vector bundle E. The fiber of F(E) over a point x is the set of all ordered bases, or frames, for Ex. The general linear group acts naturally on F(E) via a change of basis, giving the frame bundle the structure of a principal GL(k, R)-bundle (where k is the rank of E).
In mathematics, and especially differential geometry and gauge theory, a connection on a fiber bundle is a device that defines a notion of parallel transport on the bundle; that is, a way to "connect" or identify fibers over nearby points. The most common case is that of a linear connection on a vector bundle, for which the notion of parallel transport must be linear. A linear connection is equivalently specified by a covariant derivative, an operator that differentiates sections of the bundle along tangent directions in the base manifold, in such a way that parallel sections have derivative zero. Linear connections generalize, to arbitrary vector bundles, the Levi-Civita connection on the tangent bundle of a pseudo-Riemannian manifold, which gives a standard way to differentiate vector fields. Nonlinear connections generalize this concept to bundles whose fibers are not necessarily linear.
In the mathematical field of differential geometry, a Cartan connection is a flexible generalization of the notion of an affine connection. It may also be regarded as a specialization of the general concept of a principal connection, in which the geometry of the principal bundle is tied to the geometry of the base manifold using a solder form. Cartan connections describe the geometry of manifolds modelled on homogeneous spaces.
In mathematics, and especially differential geometry and gauge theory, a connection is a device that defines a notion of parallel transport on the bundle; that is, a way to "connect" or identify fibers over nearby points. A principal G-connection on a principal G-bundle P over a smooth manifold M is a particular type of connection which is compatible with the action of the group G.
In mathematics, an almost complex manifold is a smooth manifold equipped with a smooth linear complex structure on each tangent space. Every complex manifold is an almost complex manifold, but there are almost complex manifolds that are not complex manifolds. Almost complex structures have important applications in symplectic geometry.

In differential geometry, an affine connection is a geometric object on a smooth manifold which connects nearby tangent spaces, so it permits tangent vector fields to be differentiated as if they were functions on the manifold with values in a fixed vector space. Connections are among the simplest methods of defining differentiation of the sections of vector bundles.

In differential geometry, the holonomy of a connection on a smooth manifold is a general geometrical consequence of the curvature of the connection measuring the extent to which parallel transport around closed loops fails to preserve the geometrical data being transported. For flat connections, the associated holonomy is a type of monodromy and is an inherently global notion. For curved connections, holonomy has nontrivial local and global features.
In mathematics, and specifically differential geometry, a connection form is a manner of organizing the data of a connection using the language of moving frames and differential forms.
In physics and mathematics, supermanifolds are generalizations of the manifold concept based on ideas coming from supersymmetry. Several definitions are in use, some of which are described below.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a vector space to allow one to apply calculus. Any manifold can be described by a collection of charts (atlas). One may then apply ideas from calculus while working within the individual charts, since each chart lies within a vector space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In mathematics, and more specifically in differential geometry, a Hermitian manifold is the complex analogue of a Riemannian manifold. More precisely, a Hermitian manifold is a complex manifold with a smoothly varying Hermitian inner product on each (holomorphic) tangent space. One can also define a Hermitian manifold as a real manifold with a Riemannian metric that preserves a complex structure.
In mathematics, the vertical bundle and the horizontal bundle are vector bundles associated to a smooth fiber bundle. More precisely, given a smooth fiber bundle , the vertical bundle and horizontal bundle are subbundles of the tangent bundle of whose Whitney sum satisfies . This means that, over each point , the fibers and form complementary subspaces of the tangent space . The vertical bundle consists of all vectors that are tangent to the fibers, while the horizontal bundle requires some choice of complementary subbundle.

In differential geometry, the notion of torsion is a manner of characterizing a twist or screw of a moving frame around a curve. The torsion of a curve, as it appears in the Frenet–Serret formulas, for instance, quantifies the twist of a curve about its tangent vector as the curve evolves. In the geometry of surfaces, the geodesic torsion describes how a surface twists about a curve on the surface. The companion notion of curvature measures how moving frames "roll" along a curve "without twisting".
In differential geometry, an Ehresmann connection is a version of the notion of a connection, which makes sense on any smooth fiber bundle. In particular, it does not rely on the possible vector bundle structure of the underlying fiber bundle, but nevertheless, linear connections may be viewed as a special case. Another important special case of Ehresmann connections are principal connections on principal bundles, which are required to be equivariant in the principal Lie group action.
In mathematics, more precisely in differential geometry, a soldering of a fiber bundle to a smooth manifold is a manner of attaching the fibers to the manifold in such a way that they can be regarded as tangent. Intuitively, soldering expresses in abstract terms the idea that a manifold may have a point of contact with a certain model Klein geometry at each point. In extrinsic differential geometry, the soldering is simply expressed by the tangency of the model space to the manifold. In intrinsic geometry, other techniques are needed to express it. Soldering was introduced in this general form by Charles Ehresmann in 1950.
In algebraic geometry and differential geometry, the nonabelian Hodge correspondence or Corlette–Simpson correspondence is a correspondence between Higgs bundles and representations of the fundamental group of a smooth, projective complex algebraic variety, or a compact Kähler manifold.
In differential geometry, a quaternionic manifold is a quaternionic analog of a complex manifold. The definition is more complicated and technical than the one for complex manifolds due in part to the noncommutativity of the quaternions and in part to the lack of a suitable calculus of holomorphic functions for quaternions. The most succinct definition uses the language of G-structures on a manifold. Specifically, a quaternionic n-manifold can be defined as a smooth manifold of real dimension 4n equipped with a torsion-free -structure. More naïve, but straightforward, definitions lead to a dearth of examples, and exclude spaces like quaternionic projective space which should clearly be considered as quaternionic manifolds.
In mathematics, and especially differential geometry and mathematical physics, gauge theory is the general study of connections on vector bundles, principal bundles, and fibre bundles. Gauge theory in mathematics should not be confused with the closely related concept of a gauge theory in physics, which is a field theory which admits gauge symmetry. In mathematics theory means a mathematical theory, encapsulating the general study of a collection of concepts or phenomena, whereas in the physical sense a gauge theory is a mathematical model of some natural phenomenon.










































