
The Viking 2 mission was part of the American Viking program to Mars, and consisted of an orbiter and a lander essentially identical to that of the Viking 1 mission. Viking 2 was operational on Mars for 1281 sols. The Viking 2 lander operated on the surface for 1,316 days, or 1281 sols, and was turned off on April 12, 1980, when its batteries failed. The orbiter worked until July 25, 1978, returning almost 16,000 images in 706 orbits around Mars.

The Mars 2 was an uncrewed space probe of the Mars program, a series of uncrewed Mars landers and orbiters launched by the Soviet Union beginning 19 May 1971. The Mars 2 and Mars 3 missions consisted of identical spacecraft, each with an orbiter and an attached lander. The orbiter is identical to the Venera 9 bus. The type of bus/orbiter is the 4MV. They were launched by a Proton-K heavy launch vehicle with a Blok D upper stage. The lander of Mars 2 became the first human-made object to reach the surface of Mars, although the landing system failed and the lander was lost.
Mars 3 was a robotic space probe of the Soviet Mars program, launched May 28, 1971, nine days after its twin spacecraft Mars 2. The probes were identical robotic spacecraft launched by Proton-K rockets with a Blok D upper stage, each consisting of an orbiter and an attached lander. After the Mars 2 lander crashed on the Martian surface, the Mars 3 lander became the first spacecraft to attain a soft landing on Mars, on December 2, 1971. It failed 110 seconds after landing, having transmitted only a gray image with no details. The Mars 2 orbiter and Mars 3 orbiter continued to circle Mars and transmit images back to Earth for another eight months.

A lander is a spacecraft that descends towards, then comes to rest on the surface of an astronomical body other than Earth. In contrast to an impact probe, which makes a hard landing that damages or destroys the probe upon reaching the surface, a lander makes a soft landing after which the probe remains functional.

The Mars Polar Lander, also known as the Mars Surveyor '98 Lander, was a 290-kilogram robotic spacecraft lander launched by NASA on January 3, 1999, to study the soil and climate of Planum Australe, a region near the south pole on Mars. It formed part of the Mars Surveyor '98 mission. On December 3, 1999, however, after the descent phase was expected to be complete, the lander failed to reestablish communication with Earth. A post-mortem analysis determined the most likely cause of the mishap was premature termination of the engine firing prior to the lander touching the surface, causing it to strike the planet at a high velocity.

Gusev is a crater on the planet Mars and is located at 14.5°S 175.4°E and is in the Aeolis quadrangle. The crater is about 166 kilometers in diameter and formed approximately three to four billion years ago. It was named after Russian astronomer Matvey Gusev (1826–1866) in 1976.

Phoenix was an uncrewed space probe that landed on the surface of Mars on May 25, 2008, and operated until November 2, 2008. Phoenix was operational on Mars for 157 sols. Its instruments were used to assess the local habitability and to research the history of water on Mars. The mission was part of the Mars Scout Program; its total cost was $420 million, including the cost of launch.
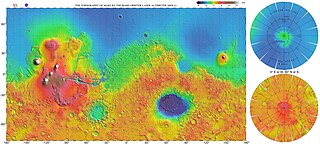
Vastitas Borealis is the largest lowland region of Mars. It is in the northerly latitudes of the planet and encircles the northern polar region. Vastitas Borealis is often simply referred to as the northern plains, northern lowlands or the North polar erg of Mars. The plains lie 4–5 km below the mean radius of the planet, and is centered at 87.73°N 32.53°E. A small part of Vastitas Borealis reaches below 65°N.

A Mars landing is a landing of a spacecraft on the surface of Mars. Of multiple attempted Mars landings by robotic, uncrewed spacecraft, ten have had successful soft landings. There have also been studies for a possible human mission to Mars including a landing, but none have been attempted.

Jezero is a crater on Mars in the Syrtis Major quadrangle, about 45.0 km (28.0 mi) in diameter. Thought to have once been flooded with water, the crater contains a fan-delta deposit rich in clays. The lake in the crater was present when valley networks were forming on Mars. Besides having a delta, the crater shows point bars and inverted channels. From a study of the delta and channels, it was concluded that the lake inside the crater probably formed during a period in which there was continual surface runoff.

Martian soil is the fine regolith found on the surface of Mars. Its properties can differ significantly from those of terrestrial soil, including its toxicity due to the presence of perchlorates. The term Martian soil typically refers to the finer fraction of regolith. So far, no samples have been returned to Earth, the goal of a Mars sample-return mission, but the soil has been studied remotely with the use of Mars rovers and Mars orbiters.

The Diacria quadrangle is one of a series of 30 quadrangle maps of Mars used by the United States Geological Survey (USGS) Astrogeology Research Program. The quadrangle is located in the northwestern portion of Mars' western hemisphere and covers 180° to 240° east longitude and 30° to 65° north latitude. The quadrangle uses a Lambert conformal conic projection at a nominal scale of 1:5,000,000 (1:5M). The Diacria quadrangle is also referred to as MC-2. The Diacria quadrangle covers parts of Arcadia Planitia and Amazonis Planitia.

Almost all water on Mars today exists as ice, though it also exists in small quantities as vapor in the atmosphere. What was thought to be low-volume liquid brines in shallow Martian soil, also called recurrent slope lineae, may be grains of flowing sand and dust slipping downhill to make dark streaks. While most water ice is buried, it is exposed at the surface across several locations on Mars. In the mid-latitudes, it is exposed by impact craters, steep scarps and gullies. Additionally, water ice is also visible at the surface at the north polar ice cap. Abundant water ice is also present beneath the permanent carbon dioxide ice cap at the Martian south pole. More than 5 million km3 of ice have been detected at or near the surface of Mars, enough to cover the whole planet to a depth of 35 meters (115 ft). Even more ice might be locked away in the deep subsurface. Some liquid water may occur transiently on the Martian surface today, but limited to traces of dissolved moisture from the atmosphere and thin films, which are challenging environments for known life. No evidence of present-day liquid water has been discovered on the planet's surface because under typical Martian conditions, warming water ice on the Martian surface would sublime at rates of up to 4 meters per year. Before about 3.8 billion years ago, Mars may have had a denser atmosphere and higher surface temperatures, potentially allowing greater amounts of liquid water on the surface, possibly including a large ocean that may have covered one-third of the planet. Water has also apparently flowed across the surface for short periods at various intervals more recently in Mars' history. Aeolis Palus in Gale Crater, explored by the Curiosity rover, is the geological remains of an ancient freshwater lake that could have been a hospitable environment for microbial life. The present-day inventory of water on Mars can be estimated from spacecraft images, remote sensing techniques, and surface investigations from landers and rovers. Geologic evidence of past water includes enormous outflow channels carved by floods, ancient river valley networks, deltas, and lakebeds; and the detection of rocks and minerals on the surface that could only have formed in liquid water. Numerous geomorphic features suggest the presence of ground ice (permafrost) and the movement of ice in glaciers, both in the recent past and present. Gullies and slope lineae along cliffs and crater walls suggest that flowing water continues to shape the surface of Mars, although to a far lesser degree than in the ancient past.

Mars Exploration Program (MEP) is a long-term effort to explore the planet Mars, funded and led by NASA. Formed in 1993, MEP has made use of orbital spacecraft, landers, and Mars rovers to explore the possibilities of life on Mars, as well as the planet's climate and natural resources. The program is managed by NASA's Science Mission Directorate by Doug McCuistion of the Planetary Science Division. As a result of 40% cuts to NASA's budget for fiscal year 2013, the Mars Program Planning Group (MPPG) was formed to help reformulate the MEP, bringing together leaders of NASA's technology, science, human operations, and science missions.
To date, interplanetary spacecraft have provided abundant evidence of water on Mars, dating back to the Mariner 9 mission, which arrived at Mars in 1971. This article provides a mission by mission breakdown of the discoveries they have made. For a more comprehensive description of evidence for water on Mars today, and the history of water on that planet, see Water on Mars.

The Interior Exploration using Seismic Investigations, Geodesy and Heat Transport (InSight) mission was a robotic lander designed to study the deep interior of the planet Mars. It was manufactured by Lockheed Martin Space, was managed by NASA's Jet Propulsion Laboratory (JPL), and two of its three scientific instruments were built by European agencies. The mission launched on 5 May 2018 at 11:05:01 UTC aboard an Atlas V-401 launch vehicle and successfully landed at Elysium Planitia on Mars on 26 November 2018 at 19:52:59 UTC. InSight was active on Mars for 1440 sols.

Icebreaker Life is a Mars lander mission concept proposed to NASA's Discovery Program. The mission involves a stationary lander that would be a near copy of the successful 2008 Phoenix and InSight spacecraft, but would carry an astrobiology scientific payload, including a drill to sample ice-cemented ground in the northern plains to conduct a search for biosignatures of current or past life on Mars.

Schiaparelli EDM was a failed Entry, Descent, and Landing Demonstrator Module (EDM) of the ExoMars programme—a joint mission of the European Space Agency (ESA) and the Russian Space Agency Roscosmos. It was built in Italy and was intended to test technology for future soft landings on the surface of Mars. It also had a limited but focused science payload that would have measured atmospheric electricity on Mars and local meteorological conditions.
The following outline is provided as an overview of and topical guide to Mars:



