Proofs and their relationships to the Pythagorean theorem
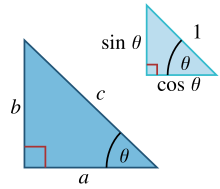
Similar right triangles showing sine and cosine of angle θ
Proof based on right-angle triangles
Any similar triangles have the property that if we select the same angle in all of them, the ratio of the two sides defining the angle is the same regardless of which similar triangle is selected, regardless of its actual size: the ratios depend upon the three angles, not the lengths of the sides. Thus for either of the similar right triangles in the figure, the ratio of its horizontal side to its hypotenuse is the same, namely cosθ.
The elementary definitions of the sine and cosine functions in terms of the sides of a right triangle are:
The Pythagorean identity follows by squaring both definitions above, and adding; the left-hand side of the identity then becomes
which by the Pythagorean theorem is equal to 1. This definition is valid for all angles, due to the definition of defining and for the unit circle and thus and for a circle of radius c and reflecting our triangle in the y axis and setting and .
Alternatively, the identities found at Trigonometric symmetry, shifts, and periodicity may be employed. By the periodicity identities we can say if the formula is true for −π < θ ≤ π then it is true for all realθ. Next we prove the identity in the range π/2 < θ ≤ π, to do this we let t = θ − π/2,t will now be in the range 0 < t ≤ π/2. We can then make use of squared versions of some basic shift identities (squaring conveniently removes the minus signs):
All that remains is to prove it for −π < θ < 0; this can be done by squaring the symmetry identities to get
Related identities
Similar right triangles illustrating the tangent and secant trigonometric functions.Trigonometric functions and their reciprocals on the unit circle. The Pythagorean theorem applied to the blue triangle shows the identity 1 + cotθ = cscθ, and applied to the red triangle shows that 1 + tanθ = secθ.
The identities
and
are also called Pythagorean trigonometric identities.[1] If one leg of a right triangle has length1, then the tangent of the angle adjacent to that leg is the length of the other leg, and the secant of the angle is the length of the hypotenuse.
and:
In this way, this trigonometric identity involving the tangent and the secant follows from the Pythagorean theorem. The angle opposite the leg of length1 (this angle can be labeled φ = π/2 − θ) has cotangent equal to the length of the other leg, and cosecant equal to the length of the hypotenuse. In that way, this trigonometric identity involving the cotangent and the cosecant also follows from the Pythagorean theorem.
The following table gives the identities with the factor or divisor that relates them to the main identity.
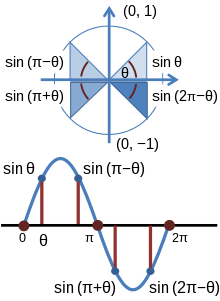
Point P(x,y) on the circle of unit radius at an obtuse angleθ > π/2Sine function on unit circle (top) and its graph (bottom)
The unit circle centered at the origin in the Euclidean plane is defined by the equation:[2]
Given an angle θ, there is a unique point P on the unit circle at an anticlockwise angle of θ from the x-axis, and the x- and y-coordinates of P are:[3]
Consequently, from the equation for the unit circle:
the Pythagorean identity.
In the figure, the point P has a negative x-coordinate, and is appropriately given by x = cosθ, which is a negative number: cosθ = −cos(π−θ). Point P has a positive y-coordinate, and sinθ = sin(π−θ) > 0. As θ increases from zero to the full circle θ = 2π, the sine and cosine change signs in the various quadrants to keep x and y with the correct signs. The figure shows how the sign of the sine function varies as the angle changes quadrant.
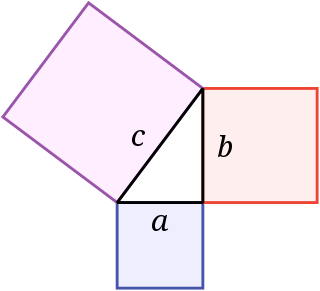
Because the x- and y-axes are perpendicular, this Pythagorean identity is equivalent to the Pythagorean theorem for triangles with hypotenuse of length 1 (which is in turn equivalent to the full Pythagorean theorem by applying a similar-triangles argument). See Unit circle for a short explanation.
Proof using power series
The trigonometric functions may also be defined using power series, namely (for x an angle measured in radians):[4][5]
In the expression for sin2, n must be at least 1, while in the expression for cos2, the constant term is equal to 1. The remaining terms of their sum are (with common factors removed)
When the trigonometric functions are defined in this way, the identity in combination with the Pythagorean theorem shows that these power series parameterize the unit circle, which we used in the previous section. This definition constructs the sine and cosine functions in a rigorous fashion and proves that they are differentiable, so that in fact it subsumes the previous two.
satisfying respectively y(0) = 0, y′(0) = 1 and y(0) = 1, y′(0) = 0. It follows from the theory of ordinary differential equations that the first solution, sine, has the second, cosine, as its derivative, and it follows from this that the derivative of cosine is the negative of the sine. The identity is equivalent to the assertion that the function
so z is constant. A calculation confirms that z(0) = 1, and z is a constant so z = 1 for all x, so the Pythagorean identity is established.
A similar proof can be completed using power series as above to establish that the sine has as its derivative the cosine, and the cosine has as its derivative the negative sine. In fact, the definitions by ordinary differential equation and by power series lead to similar derivations of most identities.
This proof of the identity has no direct connection with Euclid's demonstration of the Pythagorean theorem.
↑ This result can be found using the distance formula for the distance from the origin to the point . See Cynthia Y. Young (2009). Algebra and Trigonometry (2nded.). Wiley. p.210. ISBN978-0-470-22273-7. This approach assumes Pythagoras' theorem. Alternatively, one could simply substitute values and determine that the graph is a circle.
↑ Tyn Myint U., Lokenath Debnath (2007). "Example 8.12.1". Linear partial differential equations for scientists and engineers (4thed.). Springer. p.316. ISBN978-0-8176-4393-5.
Related Research Articles
Euler's formula, named after Leonhard Euler, is a mathematical formula in complex analysis that establishes the fundamental relationship between the trigonometric functions and the complex exponential function. Euler's formula states that for any real number x:
In mathematics, the trigonometric functions are real functions which relate an angle of a right-angled triangle to ratios of two side lengths. They are widely used in all sciences that are related to geometry, such as navigation, solid mechanics, celestial mechanics, geodesy, and many others. They are among the simplest periodic functions, and as such are also widely used for studying periodic phenomena through Fourier analysis.
In mathematics, hyperbolic functions are analogues of the ordinary trigonometric functions, but defined using the hyperbola rather than the circle. Just as the points (cos t, sin t) form a circle with a unit radius, the points (cosh t, sinh t) form the right half of the unit hyperbola. Also, similarly to how the derivatives of sin(t) and cos(t) are cos(t) and –sin(t) respectively, the derivatives of sinh(t) and cosh(t) are cosh(t) and +sinh(t) respectively.
In mathematics, the inverse trigonometric functions are the inverse functions of the trigonometric functions. Specifically, they are the inverses of the sine, cosine, tangent, cotangent, secant, and cosecant functions, and are used to obtain an angle from any of the angle's trigonometric ratios. Inverse trigonometric functions are widely used in engineering, navigation, physics, and geometry.
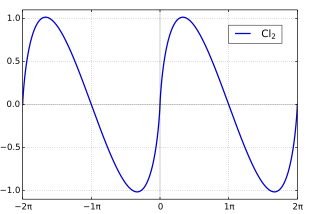
In mathematics, the Clausen function, introduced by Thomas Clausen (1832), is a transcendental, special function of a single variable. It can variously be expressed in the form of a definite integral, a trigonometric series, and various other forms. It is intimately connected with the polylogarithm, inverse tangent integral, polygamma function, Riemann zeta function, Dirichlet eta function, and Dirichlet beta function.
In mathematics, physics and engineering, the sinc function, denoted by sinc(x), has two forms, normalized and unnormalized.
In mathematics, there are several integrals known as the Dirichlet integral, after the German mathematician Peter Gustav Lejeune Dirichlet, one of which is the improper integral of the sinc function over the positive real line:
In geometry, the area enclosed by a circle of radius r is πr2. Here the Greek letter π represents the constant ratio of the circumference of any circle to its diameter, approximately equal to 3.14159.
The small-angle approximations can be used to approximate the values of the main trigonometric functions, provided that the angle in question is small and is measured in radians:
In mathematics, the lemniscate elliptic functions are elliptic functions related to the arc length of the lemniscate of Bernoulli. They were first studied by Giulio Fagnano in 1718 and later by Leonhard Euler and Carl Friedrich Gauss, among others.
In mathematics, sine and cosine are trigonometric functions of an angle. The sine and cosine of an acute angle are defined in the context of a right triangle: for the specified angle, its sine is the ratio of the length of the side that is opposite that angle to the length of the longest side of the triangle, and the cosine is the ratio of the length of the adjacent leg to that of the hypotenuse. For an angle , the sine and cosine functions are denoted simply as and .
There are several equivalent ways for defining trigonometric functions, and the proof of the trigonometric identities between them depend on the chosen definition. The oldest and somehow the most elementary definition is based on the geometry of right triangles. The proofs given in this article use this definition, and thus apply to non-negative angles not greater than a right angle. For greater and negative angles, see Trigonometric functions.
The differentiation of trigonometric functions is the mathematical process of finding the derivative of a trigonometric function, or its rate of change with respect to a variable. For example, the derivative of the sine function is written sin′(a) = cos(a), meaning that the rate of change of sin(x) at a particular angle x = a is given by the cosine of that angle.
Trigonometry is a branch of mathematics concerned with relationships between angles and ratios of lengths. The field emerged in the Hellenistic world during the 3rd century BC from applications of geometry to astronomical studies. The Greeks focused on the calculation of chords, while mathematicians in India created the earliest-known tables of values for trigonometric ratios such as sine.
In probability theory and directional statistics, a circular uniform distribution is a probability distribution on the unit circle whose density is uniform for all angles.
In mathematics, the Pythagorean theorem or Pythagoras' theorem is a fundamental relation in Euclidean geometry between the three sides of a right triangle. It states that the area of the square whose side is the hypotenuse is equal to the sum of the areas of the squares on the other two sides.
In mathematics, a unit circle is a circle of unit radius—that is, a radius of 1. Frequently, especially in trigonometry, the unit circle is the circle of radius 1 centered at the origin in the Cartesian coordinate system in the Euclidean plane. In topology, it is often denoted as S1 because it is a one-dimensional unit n-sphere.
In mathematics, Niven's theorem, named after Ivan Niven, states that the only rational values of θ in the interval 0° ≤ θ ≤ 90° for which the sine of θ degrees is also a rational number are:
The trigonometric functions for real or complex square matrices occur in solutions of second-order systems of differential equations. They are defined by the same Taylor series that hold for the trigonometric functions of real and complex numbers:
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.