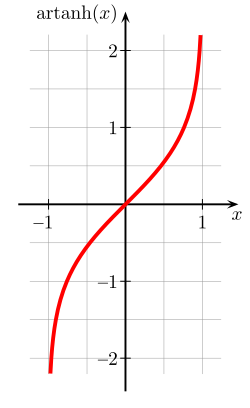
Rapidity is the value of artanh(v / c) for velocity v and speed of light c
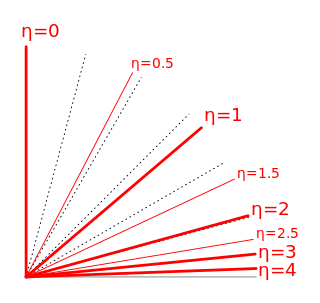
Rapidity is a measure for relativistic velocity. For one-dimensional motion, rapidities are additive. However, velocities must be combined by Einstein's velocity-addition formula. For low speeds, rapidity and velocity are almost exactly proportional but, for higher velocities, rapidity takes a larger value, with the rapidity of light being infinite.
Mathematically, rapidity can be defined as the hyperbolic angle that differentiates two frames of reference in relative motion, each frame being associated with distance and time coordinates.
Using the inverse hyperbolic functionartanh, the rapidity w corresponding to velocity v is w = artanh(v / c) where c is the velocity of light. For low speeds, w is approximately v / c. Since in relativity any velocity v is constrained to the interval −c < v < c the ratio v / c satisfies −1 < v / c < 1. The inverse hyperbolic tangent has the unit interval (−1, 1) for its domain and the whole real line for its image; that is, the interval −c < v < c maps onto −∞ < w < ∞.
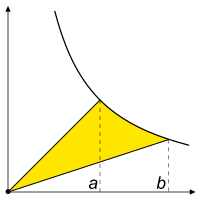
The quadrature of the hyperbola xy = 1 by Grégoire de Saint-Vincent established the natural logarithm as the area of a hyperbolic sector or an equivalent area against an asymptote. In spacetime theory, the connection of events by light divides the universe into Past, Future, or Elsewhere based on a Here and Now [clarification needed]. On any line in space, a light beam may be directed left or right. Take the x-axis as the events passed by the right beam and the y-axis as the events of the left beam. Then a resting frame has time along the diagonal x = y. The rectangular hyperbola xy = 1 can be used to gauge velocities (in the first quadrant). Zero velocity corresponds to (1,1). Any point on the hyperbola has light-cone coordinates where w is the rapidity, and is equal to the area of the hyperbolic sector from (1,1) to these coordinates. Many authors refer instead to the unit hyperbola using rapidity for a parameter, as in the standard spacetime diagram. There the axes are measured by clock and meter-stick, more familiar benchmarks, and the basis of spacetime theory. So the delineation of rapidity as a hyperbolic parameter of beam-space is a reference[clarification needed] to the seventeenth-century origin of our precious transcendental functions, and a supplement to spacetime diagramming.
Lorentz boost
The rapidity w arises in the linear representation of a Lorentz boost as a vector-matrix product
The matrix Λ(w) is of the type with p and q satisfying p2 – q2 = 1, so that (p, q) lies on the unit hyperbola. Such matrices form the indefinite orthogonal group O(1,1) with one-dimensional Lie algebra spanned by the anti-diagonal unit matrix, showing that the rapidity is the coordinate on this Lie algebra. This action may be depicted in a spacetime diagram. In matrix exponential notation, Λ(w) can be expressed as , where Z is the negative of the anti-diagonal unit matrix
It is not hard to prove that
This establishes the useful additive property of rapidity: if A, B and C are frames of reference, then
where wPQ denotes the rapidity of a frame of reference Q relative to a frame of reference P. The simplicity of this formula contrasts with the complexity of the corresponding velocity-addition formula.
As we can see from the Lorentz transformation above, the Lorentz factor identifies with cosh w
Proper acceleration (the acceleration 'felt' by the object being accelerated) is the rate of change of rapidity with respect to proper time (time as measured by the object undergoing acceleration itself). Therefore, the rapidity of an object in a given frame can be viewed simply as the velocity of that object as would be calculated non-relativistically by an inertial guidance system on board the object itself if it accelerated from rest in that frame to its given speed.
The product of β and γ appears frequently, and is from the above arguments
Exponential and logarithmic relations
From the above expressions we have
and thus
or explicitly
The Doppler-shift factor associated with rapidity w is .
In experimental particle physics
The energy E and scalar momentum |p| of a particle of non-zero (rest) mass m are given by:
With the definition of w
and thus with
the energy and scalar momentum can be written as:
So, rapidity can be calculated from measured energy and momentum by
However, experimental particle physicists often use a modified definition of rapidity relative to a beam axis
where pz is the component of momentum along the beam axis.[6] This is the rapidity of the boost along the beam axis which takes an observer from the lab frame to a frame in which the particle moves only perpendicular to the beam. Related to this is the concept of pseudorapidity.
Rapidity relative to a beam axis can also be expressed as
Walter, Scott (1999). "The non-Euclidean style of Minkowskian relativity"(PDF). In Jeremy John Gray (ed.). The Symbolic Universe: Geometry and Physics. Oxford University Press. pp.91–127. Archived from the original(PDF) on 2013-10-16. Retrieved 2009-01-08.(see page 17 of e-link)
In physics, the Lorentz transformations are a six-parameter family of linear transformations from a coordinate frame in spacetime to another frame that moves at a constant velocity relative to the former. The respective inverse transformation is then parameterized by the negative of this velocity. The transformations are named after the Dutch physicist Hendrik Lorentz.
In mathematics, hyperbolic functions are analogues of the ordinary trigonometric functions, but defined using the hyperbola rather than the circle. Just as the points (cos t, sin t) form a circle with a unit radius, the points (cosh t, sinh t) form the right half of the unit hyperbola. Also, similarly to how the derivatives of sin(t) and cos(t) are cos(t) and –sin(t) respectively, the derivatives of sinh(t) and cosh(t) are cosh(t) and +sinh(t) respectively.
In special relativity, a four-vector is an object with four components, which transform in a specific way under Lorentz transformations. Specifically, a four-vector is an element of a four-dimensional vector space considered as a representation space of the standard representation of the Lorentz group, the representation. It differs from a Euclidean vector in how its magnitude is determined. The transformations that preserve this magnitude are the Lorentz transformations, which include spatial rotations and boosts.
Relativistic rocket means any spacecraft that travels close enough to light speed for relativistic effects to become significant. The meaning of "significant" is a matter of context, but often a threshold velocity of 30% to 50% of the speed of light is used. At 30% c, the difference between relativistic mass and rest mass is only about 5%, while at 50% it is 15%, ; so above such speeds special relativity is needed to accurately describe motion, while below this range Newtonian physics and the Tsiolkovsky rocket equation usually give sufficient accuracy.
The Lorentz factor or Lorentz term is a quantity that expresses how much the measurements of time, length, and other physical properties change for an object while that object is moving. The expression appears in several equations in special relativity, and it arises in derivations of the Lorentz transformations. The name originates from its earlier appearance in Lorentzian electrodynamics – named after the Dutch physicist Hendrik Lorentz.
In relativistic physics, a velocity-addition formula is an equation that specifies how to combine the velocities of objects in a way that is consistent with the requirement that no object's speed can exceed the speed of light. Such formulas apply to successive Lorentz transformations, so they also relate different frames. Accompanying velocity addition is a kinematic effect known as Thomas precession, whereby successive non-collinear Lorentz boosts become equivalent to the composition of a rotation of the coordinate system and a boost.
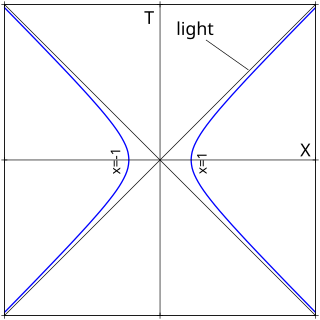
Hyperbolic motion is the motion of an object with constant proper acceleration in special relativity. It is called hyperbolic motion because the equation describing the path of the object through spacetime is a hyperbola, as can be seen when graphed on a Minkowski diagram whose coordinates represent a suitable inertial (non-accelerated) frame. This motion has several interesting features, among them that it is possible to outrun a photon if given a sufficient head start, as may be concluded from the diagram.
In experimental particle physics, pseudorapidity, , is a commonly used spatial coordinate describing the angle of a particle relative to the beam axis. It is defined as
In mathematics, the inverse hyperbolic functions are inverses of the hyperbolic functions, analogous to the inverse circular functions. There are six in common use: inverse hyperbolic sine, inverse hyperbolic cosine, inverse hyperbolic tangent, inverse hyperbolic cosecant, inverse hyperbolic secant, and inverse hyperbolic cotangent. They are commonly denoted by the symbols for the hyperbolic functions, prefixed with arc- or ar-.
The history of Lorentz transformations comprises the development of linear transformations forming the Lorentz group or Poincaré group preserving the Lorentz interval and the Minkowski inner product .
In relativity, proper velocityw of an object relative to an observer is the ratio between observer-measured displacement vector and proper time τ elapsed on the clocks of the traveling object:
The theory of special relativity plays an important role in the modern theory of classical electromagnetism. It gives formulas for how electromagnetic objects, in particular the electric and magnetic fields, are altered under a Lorentz transformation from one inertial frame of reference to another. It sheds light on the relationship between electricity and magnetism, showing that frame of reference determines if an observation follows electric or magnetic laws. It motivates a compact and convenient notation for the laws of electromagnetism, namely the "manifestly covariant" tensor form.
In fluid dynamics, Airy wave theory gives a linearised description of the propagation of gravity waves on the surface of a homogeneous fluid layer. The theory assumes that the fluid layer has a uniform mean depth, and that the fluid flow is inviscid, incompressible and irrotational. This theory was first published, in correct form, by George Biddell Airy in the 19th century.
A gyrovector space is a mathematical concept proposed by Abraham A. Ungar for studying hyperbolic geometry in analogy to the way vector spaces are used in Euclidean geometry. Ungar introduced the concept of gyrovectors that have addition based on gyrogroups instead of vectors which have addition based on groups. Ungar developed his concept as a tool for the formulation of special relativity as an alternative to the use of Lorentz transformations to represent compositions of velocities. This is achieved by introducing "gyro operators"; two 3d velocity vectors are used to construct an operator, which acts on another 3d velocity.
In hyperbolic geometry, the "law of cosines" is a pair of theorems relating the sides and angles of triangles on a hyperbolic plane, analogous to the planar law of cosines from plane trigonometry, or the spherical law of cosines in spherical trigonometry. It can also be related to the relativistic velocity addition formula.
In theoretical physics, the composition of two non-collinear Lorentz boosts results in a Lorentz transformation that is not a pure boost but is the composition of a boost and a rotation. This rotation is called Thomas rotation, Thomas–Wigner rotation or Wigner rotation. If a sequence of non-collinear boosts returns an object to its initial velocity, then the sequence of Wigner rotations can combine to produce a net rotation called the Thomas precession.
In physics, relativistic angular momentum refers to the mathematical formalisms and physical concepts that define angular momentum in special relativity (SR) and general relativity (GR). The relativistic quantity is subtly different from the three-dimensional quantity in classical mechanics.
There are many ways to derive the Lorentz transformations using a variety of physical principles, ranging from Maxwell's equations to Einstein's postulates of special relativity, and mathematical tools, spanning from elementary algebra and hyperbolic functions, to linear algebra and group theory.
Accelerations in special relativity (SR) follow, as in Newtonian Mechanics, by differentiation of velocity with respect to time. Because of the Lorentz transformation and time dilation, the concepts of time and distance become more complex, which also leads to more complex definitions of "acceleration". SR as the theory of flat Minkowski spacetime remains valid in the presence of accelerations, because general relativity (GR) is only required when there is curvature of spacetime caused by the energy–momentum tensor. However, since the amount of spacetime curvature is not particularly high on Earth or its vicinity, SR remains valid for most practical purposes, such as experiments in particle accelerators.
A proper reference frame in the theory of relativity is a particular form of accelerated reference frame, that is, a reference frame in which an accelerated observer can be considered as being at rest. It can describe phenomena in curved spacetime, as well as in "flat" Minkowski spacetime in which the spacetime curvature caused by the energy–momentum tensor can be disregarded. Since this article considers only flat spacetime—and uses the definition that special relativity is the theory of flat spacetime while general relativity is a theory of gravitation in terms of curved spacetime—it is consequently concerned with accelerated frames in special relativity.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.