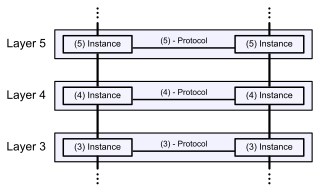
The Open Systems Interconnection (OSI) model is a reference model from the International Organization for Standardization (ISO) that "provides a common basis for the coordination of standards development for the purpose of systems interconnection." In the OSI reference model, the communications between systems are split into seven different abstraction layers: Physical, Data Link, Network, Transport, Session, Presentation, and Application.

X.25 is an ITU-T standard protocol suite for packet-switched data communication in wide area networks (WAN). It was originally defined by the International Telegraph and Telephone Consultative Committee in a series of drafts and finalized in a publication known as The Orange Book in 1976.
Zigbee is an IEEE 802.15.4-based specification for a suite of high-level communication protocols used to create personal area networks with small, low-power digital radios, such as for home automation, medical device data collection, and other low-power low-bandwidth needs, designed for small scale projects which need wireless connection. Hence, Zigbee is a low-power, low-data-rate, and close proximity wireless ad hoc network.
A controller area network is a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other. It is a message-based protocol, designed originally for multiplex electrical wiring within automobiles to save on copper, but it can also be used in many other contexts. For each device, the data in a frame is transmitted serially but in such a way that if more than one device transmits at the same time, the highest priority device can continue while the others back off. Frames are received by all devices, including by the transmitting device.
IEEE 802.15.4 is a technical standard which defines the operation of a low-rate wireless personal area network (LR-WPAN). It specifies the physical layer and media access control for LR-WPANs, and is maintained by the IEEE 802.15 working group, which defined the standard in 2003. It is the basis for the Zigbee, ISA100.11a, WirelessHART, MiWi, 6LoWPAN, Thread, Matter and SNAP specifications, each of which further extends the standard by developing the upper layers which are not defined in IEEE 802.15.4. In particular, 6LoWPAN defines a binding for the IPv6 version of the Internet Protocol (IP) over WPANs, and is itself used by upper layers like Thread.

Telematics is an interdisciplinary field encompassing telecommunications, vehicular technologies, electrical engineering, and computer science. Telematics can involve any of the following:
LIN is a network protocol used for communication between components in modern vehicles. It is a low-cost single-wire serial protocol that supports communications up to 19.2 Kbit/s with a maximum bus length of 40 metres (131.2 ft).
RV-C is a communications protocol based on the Controller Area Network bus. The protocol is used in recreation vehicles to allow house and chassis components to communicate. RV-C is used for control, coordination, and diagnostics, in a multi-vendor environment.

On-board diagnostics (OBD) is a term referring to a vehicle's self-diagnostic and reporting capability. In the United States, this self-diagnostic is a requirement to comply with Federal Emissions standards to detect failures that may increase the vehicle tailpipe emissions to more than 150% of the standard to which it was originally certified.

ISO 11783, known as Tractors and machinery for agriculture and forestry—Serial control and communications data network is a communication protocol for the agriculture industry based on, and harmonized with, the SAE J1939 protocol.
OBD-II PIDs are codes used to request data from a vehicle, used as a diagnostic tool.
DeviceNet is a network protocol used in the automation industry to interconnect control devices for data exchange. It utilizes the Common Industrial Protocol over a Controller Area Network media layer and defines an application layer to cover a range of device profiles. Typical applications include information exchange, safety devices, and large I/O control networks.
NMEA 2000, abbreviated to NMEA2k or N2K and standardized as IEC 61162-3, is a plug-and-play communications standard used for connecting marine sensors and display units within ships and boats. Communication runs at 250 kilobits-per-second and allows any sensor to talk to any display unit or other device compatible with NMEA 2000 protocols.
ISO 11992 is a CAN based vehicle bus standard by the heavy duty truck industry. It is used for communication between the tractor and one or more trailers. Its full title is "Road vehicles -- Interchange of digital information on electrical connections between towing and towed vehicles".
Society of Automotive Engineers standard SAE J1708 is a standard used for serial communications between ECUs on a heavy duty vehicle and also between a computer and the vehicle. With respect to Open System Interconnection model (OSI), J1708 defines the physical layer. Common higher layer protocols that operate on top of J1708 are SAE J1587 and SAE J1922. The protocol is maintained by SAE International.
The Fleet Management Systems Interface (FMS) is a standard interface to vehicle data of commercial vehicles. The six European manufacturers Daimler AG, MAN AG, Scania, Volvo (including Renault), DAF Trucks and IVECO developed the so-called FMS-Standard in 2002 to make manufacturer-independent applications for telematics possible.
ISO 15765-2, or ISO-TP (Transport Layer), is an international standard for sending data packets over a CAN-Bus. The protocol allows for the transport of messages that exceed the eight byte maximum payload of CAN frames. ISO-TP segments longer messages into multiple frames, adding metadata (CAN-TP Header) that allows the interpretation of individual frames and reassembly into a complete message packet by the recipient. It can carry up to 232-1 (4294967295) bytes of payload per message packet starting from the 2016 version. Prior version were limited to a maximum payload size of 4095 bytes.
The ELM327 is a programmed microcontroller produced for translating the on-board diagnostics (OBD) interface found in most modern cars. The ELM327 command protocol is one of the most popular PC-to-OBD interface standards and is also implemented by other vendors.
CAN FD is a data-communication protocol used for broadcasting sensor data and control information on 2 wire interconnections between different parts of electronic instrumentation and control system. This protocol is used in modern high performance vehicles.

CANpie is an open source project and pursues the objective of creating and establishing an open and standardized software API for access to the CAN bus.