
In mathematics, curvature is any of several strongly related concepts in geometry. Intuitively, the curvature is the amount by which a curve deviates from being a straight line, or a surface deviates from being a plane.
In the mathematical field of differential geometry, the Riemann curvature tensor or Riemann–Christoffel tensor is the most common way used to express the curvature of Riemannian manifolds. It assigns a tensor to each point of a Riemannian manifold. It is a local invariant of Riemannian metrics which measures the failure of the second covariant derivatives to commute. A Riemannian manifold has zero curvature if and only if it is flat, i.e. locally isometric to the Euclidean space. The curvature tensor can also be defined for any pseudo-Riemannian manifold, or indeed any manifold equipped with an affine connection.
In differential geometry, the Ricci curvature tensor, named after Gregorio Ricci-Curbastro, is a geometric object which is determined by a choice of Riemannian or pseudo-Riemannian metric on a manifold. It can be considered, broadly, as a measure of the degree to which the geometry of a given metric tensor differs locally from that of ordinary Euclidean space or pseudo-Euclidean space.
In Riemannian geometry, the sectional curvature is one of the ways to describe the curvature of Riemannian manifolds. The sectional curvature K(σp) depends on a two-dimensional linear subspace σp of the tangent space at a point p of the manifold. It can be defined geometrically as the Gaussian curvature of the surface which has the plane σp as a tangent plane at p, obtained from geodesics which start at p in the directions of σp. The sectional curvature is a real-valued function on the 2-Grassmannian bundle over the manifold.
In the mathematical field of Riemannian geometry, the scalar curvature is a measure of the curvature of a Riemannian manifold. To each point on a Riemannian manifold, it assigns a single real number determined by the geometry of the metric near that point. It is defined by a complicated explicit formula in terms of partial derivatives of the metric components, although it is also characterized by the volume of infinitesimally small geodesic balls. In the context of the differential geometry of surfaces, the scalar curvature is twice the Gaussian curvature, and completely characterizes the curvature of a surface. In higher dimensions, however, the scalar curvature only represents one particular part of the Riemann curvature tensor.
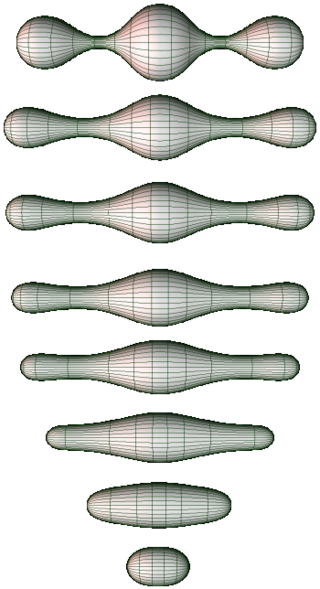
In the mathematical fields of differential geometry and geometric analysis, the Ricci flow, sometimes also referred to as Hamilton's Ricci flow, is a certain partial differential equation for a Riemannian metric. It is often said to be analogous to the diffusion of heat and the heat equation, due to formal similarities in the mathematical structure of the equation. However, it is nonlinear and exhibits many phenomena not present in the study of the heat equation.
In mathematics and especially differential geometry, a Kähler manifold is a manifold with three mutually compatible structures: a complex structure, a Riemannian structure, and a symplectic structure. The concept was first studied by Jan Arnoldus Schouten and David van Dantzig in 1930, and then introduced by Erich Kähler in 1933. The terminology has been fixed by André Weil. Kähler geometry refers to the study of Kähler manifolds, their geometry and topology, as well as the study of structures and constructions that can be performed on Kähler manifolds, such as the existence of special connections like Hermitian Yang–Mills connections, or special metrics such as Kähler–Einstein metrics.
In mathematics, the Chern theorem states that the Euler–Poincaré characteristic of a closed even-dimensional Riemannian manifold is equal to the integral of a certain polynomial of its curvature form.
In differential geometry and mathematical physics, an Einstein manifold is a Riemannian or pseudo-Riemannian differentiable manifold whose Ricci tensor is proportional to the metric. They are named after Albert Einstein because this condition is equivalent to saying that the metric is a solution of the vacuum Einstein field equations, although both the dimension and the signature of the metric can be arbitrary, thus not being restricted to Lorentzian manifolds. Einstein manifolds in four Euclidean dimensions are studied as gravitational instantons.

In mathematics, specifically differential geometry, the infinitesimal geometry of Riemannian manifolds with dimension greater than 2 is too complicated to be described by a single number at a given point. Riemann introduced an abstract and rigorous way to define curvature for these manifolds, now known as the Riemann curvature tensor. Similar notions have found applications everywhere in differential geometry of surfaces and other objects. The curvature of a pseudo-Riemannian manifold can be expressed in the same way with only slight modifications.
Myers's theorem, also known as the Bonnet–Myers theorem, is a celebrated, fundamental theorem in the mathematical field of Riemannian geometry. It was discovered by Sumner Byron Myers in 1941. It asserts the following:
In differential geometry, the Weyl curvature tensor, named after Hermann Weyl, is a measure of the curvature of spacetime or, more generally, a pseudo-Riemannian manifold. Like the Riemann curvature tensor, the Weyl tensor expresses the tidal force that a body feels when moving along a geodesic. The Weyl tensor differs from the Riemann curvature tensor in that it does not convey information on how the volume of the body changes, but rather only how the shape of the body is distorted by the tidal force. The Ricci curvature, or trace component of the Riemann tensor contains precisely the information about how volumes change in the presence of tidal forces, so the Weyl tensor is the traceless component of the Riemann tensor. This tensor has the same symmetries as the Riemann tensor, but satisfies the extra condition that it is trace-free: metric contraction on any pair of indices yields zero. It is obtained from the Riemann tensor by subtracting a tensor that is a linear expression in the Ricci tensor.
In differential geometry, the Laplace–Beltrami operator is a generalization of the Laplace operator to functions defined on submanifolds in Euclidean space and, even more generally, on Riemannian and pseudo-Riemannian manifolds. It is named after Pierre-Simon Laplace and Eugenio Beltrami.
In the mathematical fields of Riemannian and pseudo-Riemannian geometry, the Ricci decomposition is a way of breaking up the Riemann curvature tensor of a Riemannian or pseudo-Riemannian manifold into pieces with special algebraic properties. This decomposition is of fundamental importance in Riemannian and pseudo-Riemannian geometry.
In the mathematical field of differential geometry, the Kulkarni–Nomizu product is defined for two (0, 2)-tensors and gives as a result a (0, 4)-tensor.
The Yamabe problem refers to a conjecture in the mathematical field of differential geometry, which was resolved in the 1980s. It is a statement about the scalar curvature of Riemannian manifolds:
Let (M,g) be a closed smooth Riemannian manifold. Then there exists a positive and smooth function f on M such that the Riemannian metric fg has constant scalar curvature.
In differential geometry there are a number of second-order, linear, elliptic differential operators bearing the name Laplacian. This article provides an overview of some of them.
In the mathematical field of differential geometry, a Codazzi tensor is a symmetric 2-tensor whose covariant derivative is also symmetric. Such tensors arise naturally in the study of Riemannian manifolds with harmonic curvature or harmonic Weyl tensor. In fact, existence of Codazzi tensors impose strict conditions on the curvature tensor of the manifold. Also, the second fundamental form of an immersed hypersurface in a space form is a Codazzi tensor.
In differential geometry, a complete Riemannian manifold is called a Ricci soliton if, and only if, there exists a smooth vector field such that



































































