Computer vision is an interdisciplinary scientific field that deals with how computers can gain high-level understanding from digital images or videos. From the perspective of engineering, it seeks to understand and automate tasks that the human visual system can do.

Artificial neural networks (ANNs), usually simply called neural networks (NNs), are computing systems vaguely inspired by the biological neural networks that constitute animal brains.

Jürgen Schmidhuber is a computer scientist most noted for his work in the field of artificial intelligence, deep learning and artificial neural networks. He is a co-director of the Dalle Molle Institute for Artificial Intelligence Research in Manno, in the district of Lugano, in Ticino in southern Switzerland. He is sometimes called the "father of (modern) AI"; note that other sourecs point at Frank Rosenblatt.

Gesture recognition is a topic in computer science and language technology with the goal of interpreting human gestures via mathematical algorithms. It is a subdiscipline of computer vision. Gestures can originate from any bodily motion or state but commonly originate from the face or hand. Current focuses in the field include emotion recognition from face and hand gesture recognition. Users can use simple gestures to control or interact with devices without physically touching them. Many approaches have been made using cameras and computer vision algorithms to interpret sign language. However, the identification and recognition of posture, gait, proxemics, and human behaviors is also the subject of gesture recognition techniques. Gesture recognition can be seen as a way for computers to begin to understand human body language, thus building a richer bridge between machines and humans than primitive text user interfaces or even GUIs, which still limit the majority of input to keyboard and mouse and interact naturally without any mechanical devices. Using the concept of gesture recognition, it is possible to point a finger at this point will move accordingly. This could make conventional input on devices such and even redundant.
Claytronics is an abstract future concept that combines nanoscale robotics and computer science to create individual nanometer-scale computers called claytronic atoms, or catoms, which can interact with each other to form tangible 3D objects that a user can interact with. This idea is more broadly referred to as programmable matter. Claytronics has the potential to greatly affect many areas of daily life, such as telecommunication, human-computer interfaces, and entertainment.
Automatic image annotation is the process by which a computer system automatically assigns metadata in the form of captioning or keywords to a digital image. This application of computer vision techniques is used in image retrieval systems to organize and locate images of interest from a database.

Thomas Shi-Tao Huang was a Chinese-born American computer scientist, electrical engineer, and writer. He was a researcher and professor emeritus at the University of Illinois at Urbana-Champaign (UIUC). Huang was one of the leading figures in computer vision, pattern recognition and human computer interaction.
Gregory Dudek is a chaired professor of computer science at McGill University, was the Director of the McGill Center for Intelligent Machines from 2004 to 2007, and was the Director of the McGill University School of Computer Science from 2008 to 2016. He served as the Scientific Director of the NSERC Canadian Field Robotics Network from 2012 to 2018. He became Scientific Director and Lead Investigatior or it ssuccessor the NSERC Canadian Robotics Network. In 2018, Samsung announced that he would become a VP Research and Lead their new Samsung AI Center in Montreal (SAIC-Montreal). Th is the son of poet Louis Dudek, he was made a Dawson Scholar of that university and subsequently James McGill Chair (∈), and directs the mobile robotics laboratory there. He has written over 300 refereed articles on computer vision and robotics, and is co-author of the book Computational Principles of Mobile Robotics which is used to teach robotics at a number of universities [1].
Conditional random fields (CRFs) are a class of statistical modeling method often applied in pattern recognition and machine learning and used for structured prediction. Whereas a classifier predicts a label for a single sample without considering "neighboring" samples, a CRF can take context into account. To do so, the prediction is modeled as a graphical model, which implements dependencies between the predictions. What kind of graph is used depends on the application. For example, in natural language processing, linear chain CRFs are popular, which implement sequential dependencies in the predictions. In image processing the graph typically connects locations to nearby and/or similar locations to enforce that they receive similar predictions.

In robotics and computer vision, visual odometry is the process of determining the position and orientation of a robot by analyzing the associated camera images. It has been used in a wide variety of robotic applications, such as on the Mars Exploration Rovers.
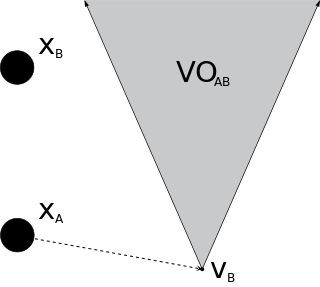
In robotics and motion planning, a velocity obstacle, commonly abbreviated VO, is the set of all velocities of a robot that will result in a collision with another robot at some moment in time, assuming that the other robot maintains its current velocity. If the robot chooses a velocity inside the velocity obstacle then the two robots will eventually collide, if it chooses a velocity outside the velocity obstacle, such a collision is guaranteed not to occur.
Masakatsu G. Fujie is a Japanese scientist who has played a major role in cutting-edge research in biomedical engineering. He has been responsible for many advances in the field of robotics.
Matti Kalevi Pietikäinen is a computer scientist. He is currently Professor (emer.) in the Center for Machine Vision and Signal Analysis, University of Oulu, Finland. His research interests are in texture-based computer vision, face analysis, affective computing, biometrics, and vision-based perceptual interfaces. He was Director of the Center for Machine Vision Research, and Scientific Director of Infotech Oulu.
Tendon-driven robots (TDR) are robots whose limbs mimic biological musculoskeletal systems. They use plastic straps to mimic muscles and tendons. Such robots are claimed to move in a "more natural" way than traditional robots that use rigid metal or plastic limbs controlled by geared actuators. TDRs can also help understand how biomechanics relates to embodied intelligence and cognition.
Cloud robotics is a field of robotics that attempts to invoke cloud technologies such as cloud computing, cloud storage, and other Internet technologies centered on the benefits of converged infrastructure and shared services for robotics. When connected to the cloud, robots can benefit from the powerful computation, storage, and communication resources of modern data center in the cloud, which can process and share information from various robots or agent. Humans can also delegate tasks to robots remotely through networks. Cloud computing technologies enable robot systems to be endowed with powerful capability whilst reducing costs through cloud technologies. Thus, it is possible to build lightweight, low-cost, smarter robots with an intelligent "brain" in the cloud. The "brain" consists of data center, knowledge base, task planners, deep learning, information processing, environment models, communication support, etc.
A facial expression database is a collection of images or video clips with facial expressions of a range of emotions. Well-annotated (emotion-tagged) media content of facial behavior is essential for training, testing, and validation of algorithms for the development of expression recognition systems. The emotion annotation can be done in discrete emotion labels or on a continuous scale. Most of the databases are usually based on the basic emotions theory which assumes the existence of six discrete basic emotions. However, some databases include the emotion tagging in continuous arousal-valence scale.

René Vidal is a Chilean electrical engineer and computer scientist who is known for his research in machine learning, computer vision, medical image computing, robotics, and control theory. He is the Herschel L. Seder Professor of the Johns Hopkins Department of Biomedical Engineering, and the founding director of the Mathematical Institute for Data Science (MINDS).

Gregory D. Hager is the Mandell Bellmore Professor of Computer Science and founding director of the Johns Hopkins Malone Center for Engineering in Healthcare at Johns Hopkins University.
R Chli is an Assistant Professor and leader of the Vision for Robotics Lab at ETH Zürich in Switzerland. Chli is a leader in the field of computer vision and robotics and was on the team of researchers to develop the first fully autonomous helicopter with onboard localization and mapping. Chli is also the Vice Director of the Institute of Robotics and Intelligent Systems and an Honorary Fellow of the University of Edinburgh in the United Kingdom. Her research currently focuses on developing visual perception and intelligence in flying autonomous robotic systems.