In biomechanics, Hill's muscle model refers to the 3-element model consisting of a contractile element (CE) in series with a lightly-damped elastic spring element (SE) and in parallel with lightly-damped elastic parallel element (PE). Within this model, the estimated force-velocity relation for the CE element is usually modeled by what is commonly called Hill's equation, which was based on careful experiments involving tetanizedmuscle contraction where various muscle loads and associated velocities were measured. They were derived by the famous physiologistArchibald Vivian Hill, who by 1938 when he introduced this model and equation had already won the Nobel Prize for Physiology. He continued to publish in this area through 1970. There are many forms of the basic "Hill-based" or "Hill-type" models, with hundreds of publications having used this model structure for experimental and simulation studies. Most major musculoskeletal simulation packages make use of this model.
is the maximum isometric tension (or load) generated in the muscle
coefficient of shortening heat
is the maximum velocity, when
Although Hill's equation looks very much like the van der Waals equation, the former has units of energy dissipation, while the latter has units of energy. Hill's equation demonstrates that the relationship between F and v is hyperbolic. Therefore, the higher the load applied to the muscle, the lower the contraction velocity. Similarly, the higher the contraction velocity, the lower the tension in the muscle. This hyperbolic form has been found to fit the empirical constant only during isotonic contractions near resting length.[1]
The muscle tension decreases as the shortening velocity increases. This feature has been attributed to two main causes. The major appears to be the loss in tension as the cross bridges in the contractile element and then reform in a shortened condition. The second cause appears to be the fluid viscosity in both the contractile element and the connective tissue. Whichever the cause of loss of tension, it is a viscous friction and can therefore be modeled as a fluid damper .[2]
Three-element model
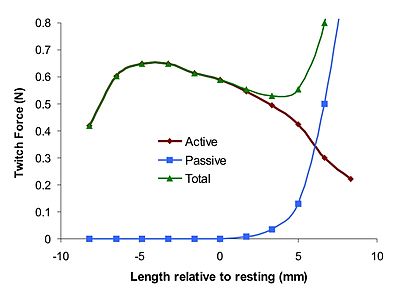
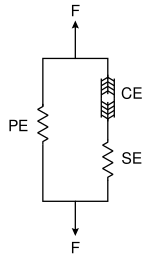
Muscle length vs Force. In Hill's muscle model the active and passive forces are respectively and .Hill's elastic muscle model. F: Force; CE: Contractile Element; SE: Series Element; PE: Parallel Element.
The three-element Hill muscle model is a representation of the muscle mechanical response. The model is constituted by a contractile element (CE) and two non-linearspring elements, one in series (SE) and another in parallel (PE). The active force of the contractile element comes from the force generated by the actin and myosin cross-bridges at the sarcomere level. It is fully extensible when inactive but capable of shortening when activated. The connective tissues (fascia, epimysium, perimysium and endomysium) that surround the contractile element influences the muscle's force-length curve. The parallel element represents the passive force of these connective tissues and has a soft tissue mechanical behavior. The parallel element is responsible for the muscle passive behavior when it is stretched, even when the contractile element is not activated. The series element represents the tendon and the intrinsic elasticity of the myofilaments. It also has a soft tissue response and provides energy storing mechanism.[2][3]
The net force-length characteristics of a muscle is a combination of the force-length characteristics of both active and passive elements. The forces in the contractile element, in the series element and in the parallel element, , and , respectively, satisfy
On the other hand, the muscle length and the lengths , and of those elements satisfy
During isometric contractions the series elastic component is under tension and therefore is stretched a finite amount. Because the overall length of the muscle is kept constant, the stretching of the series element can only occur if there is an equal shortening of the contractile element itself.[2]
The forces in the parallel, series and contractile elements are defined by:
where are strain measures for the different elements defined by:
where is the deformed muscle length and is the deformed muscle length due to motion of the contractile element, both from equation (3). is the rest length of the muscle. can be split as . The force term, , is the peak isometric muscle force and the functions are given by:
where are empirical constants. The function from equation (4) represents the muscle activation. It is defined based on the ordinary differential equation:
where are time constants related to rise and decay for muscle activation and is a minimum bound, all determined from experiments. is the neural excitation that leads to muscle contraction.[4][5]
In physics, the Lorentz transformations are a six-parameter family of linear transformations from a coordinate frame in spacetime to another frame that moves at a constant velocity relative to the former. The respective inverse transformation is then parameterized by the negative of this velocity. The transformations are named after the Dutch physicist Hendrik Lorentz.
The Navier–Stokes equations are partial differential equations which describe the motion of viscous fluid substances. They were named after French engineer and physicist Claude-Louis Navier and the Irish physicist and mathematician George Gabriel Stokes. They were developed over several decades of progressively building the theories, from 1822 (Navier) to 1842–1850 (Stokes).
In mathematical optimization, the method of Lagrange multipliers is a strategy for finding the local maxima and minima of a function subject to equation constraints. It is named after the mathematician Joseph-Louis Lagrange.
In physics, a Langevin equation is a stochastic differential equation describing how a system evolves when subjected to a combination of deterministic and fluctuating ("random") forces. The dependent variables in a Langevin equation typically are collective (macroscopic) variables changing only slowly in comparison to the other (microscopic) variables of the system. The fast (microscopic) variables are responsible for the stochastic nature of the Langevin equation. One application is to Brownian motion, which models the fluctuating motion of a small particle in a fluid.
In mathematics, the Hodge star operator or Hodge star is a linear map defined on the exterior algebra of a finite-dimensional oriented vector space endowed with a nondegenerate symmetric bilinear form. Applying the operator to an element of the algebra produces the Hodge dual of the element. This map was introduced by W. V. D. Hodge.
In mathematics, the classical orthogonal polynomials are the most widely used orthogonal polynomials: the Hermite polynomials, Laguerre polynomials, Jacobi polynomials.
In mathematics, separation of variables is any of several methods for solving ordinary and partial differential equations, in which algebra allows one to rewrite an equation so that each of two variables occurs on a different side of the equation.
In mathematics, the discrete Laplace operator is an analog of the continuous Laplace operator, defined so that it has meaning on a graph or a discrete grid. For the case of a finite-dimensional graph, the discrete Laplace operator is more commonly called the Laplacian matrix.
In general relativity, a geodesic generalizes the notion of a "straight line" to curved spacetime. Importantly, the world line of a particle free from all external, non-gravitational forces is a particular type of geodesic. In other words, a freely moving or falling particle always moves along a geodesic.
In continuum mechanics, the finite strain theory—also called large strain theory, or large deformation theory—deals with deformations in which strains and/or rotations are large enough to invalidate assumptions inherent in infinitesimal strain theory. In this case, the undeformed and deformed configurations of the continuum are significantly different, requiring a clear distinction between them. This is commonly the case with elastomers, plastically-deforming materials and other fluids and biological soft tissue.
A bond graph is a graphical representation of a physical dynamic system. It allows the conversion of the system into a state-space representation. It is similar to a block diagram or signal-flow graph, with the major difference that the arcs in bond graphs represent bi-directional exchange of physical energy, while those in block diagrams and signal-flow graphs represent uni-directional flow of information. Bond graphs are multi-energy domain and domain neutral. This means a bond graph can incorporate multiple domains seamlessly.
In physics, the Bethe ansatz is an ansatz for finding the exact wavefunctions of certain quantum many-body models, most commonly for one-dimensional lattice models. It was first used by Hans Bethe in 1931 to find the exact eigenvalues and eigenvectors of the one-dimensional antiferromagnetic isotropic (XXX) Heisenberg model.
Distance measures are used in physical cosmology to give a natural notion of the distance between two objects or events in the universe. They are often used to tie some observable quantity to another quantity that is not directly observable, but is more convenient for calculations. The distance measures discussed here all reduce to the common notion of Euclidean distance at low redshift.
In astrophysics, the Tolman–Oppenheimer–Volkoff (TOV) equation constrains the structure of a spherically symmetric body of isotropic material which is in static gravitational equilibrium, as modeled by general relativity. The equation is
In classical mechanics, holonomic constraints are relations between the position variables that can be expressed in the following form:
In the mathematical theory of random matrices, the Marchenko–Pastur distribution, or Marchenko–Pastur law, describes the asymptotic behavior of singular values of large rectangular random matrices. The theorem is named after Soviet mathematicians Volodymyr Marchenko and Leonid Pastur who proved this result in 1967.
In general relativity, the Vaidya metric describes the non-empty external spacetime of a spherically symmetric and nonrotating star which is either emitting or absorbing null dusts. It is named after the Indian physicist Prahalad Chunnilal Vaidya and constitutes the simplest non-static generalization of the non-radiative Schwarzschild solution to Einstein's field equation, and therefore is also called the "radiating(shining) Schwarzschild metric".
In theoretical physics, relativistic Lagrangian mechanics is Lagrangian mechanics applied in the context of special relativity and general relativity.
The acoustoelastic effect is how the sound velocities of an elastic material change if subjected to an initial static stress field. This is a non-linear effect of the constitutive relation between mechanical stress and finite strain in a material of continuous mass. In classical linear elasticity theory small deformations of most elastic materials can be described by a linear relation between the applied stress and the resulting strain. This relationship is commonly known as the generalised Hooke's law. The linear elastic theory involves second order elastic constants and yields constant longitudinal and shear sound velocities in an elastic material, not affected by an applied stress. The acoustoelastic effect on the other hand include higher order expansion of the constitutive relation between the applied stress and resulting strain, which yields longitudinal and shear sound velocities dependent of the stress state of the material. In the limit of an unstressed material the sound velocities of the linear elastic theory are reproduced.
In mathematical physics, the Garnier integrable system, also known as the classical Gaudin model is a classical mechanical system discovered by René Garnier in 1919 by taking the 'Painlevé simplification' or 'autonomous limit' of the Schlesinger equations. It is a classical analogue to the quantum Gaudin model due to Michel Gaudin. The classical Gaudin models are integrable.
1 2 3 4 Fung, Y.-C. (1993). Biomechanics: Mechanical Properties of Living Tissues. New York: Springer-Verlag. p.568. ISBN0-387-97947-6.
↑ Martins, J.A.C.; Pires, E.B; Salvado, R.; Dinis, P.B. (1998). "Numerical model of passive and active behavior of skeletal muscles". Computer Methods in Applied Mechanics and Engineering. Elsevier. 151 (3–4): 419–433. Bibcode:1998CMAME.151..419M. doi:10.1016/S0045-7825(97)00162-X.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.