
In digital computers, an interrupt is a request for the processor to interrupt currently executing code, so that the event can be processed in a timely manner. If the request is accepted, the processor will suspend its current activities, save its state, and execute a function called an interrupt handler to deal with the event. This interruption is often temporary, allowing the software to resume normal activities after the interrupt handler finishes, although the interrupt could instead indicate a fatal error.
A real-time operating system (RTOS) is an operating system (OS) for real-time applications that processes data and events that have critically defined time constraints. An RTOS is distinct from a time-sharing operating system, such as Unix, which manages the sharing of system resources with a scheduler, data buffers, or fixed task prioritization in a multitasking or multiprogramming environment. Processing time requirements need to be fully understood and bound rather than just kept as a minimum. All processing must occur within the defined constraints. Real-time operating systems are event-driven and preemptive, meaning the OS is capable of monitoring the relevant priority of competing tasks, and make changes to the task priority. Event-driven systems switch between tasks based on their priorities, while time-sharing systems switch the task based on clock interrupts.
x86 memory segmentation refers to the implementation of memory segmentation in the Intel x86 computer instruction set architecture. Segmentation was introduced on the Intel 8086 in 1978 as a way to allow programs to address more than 64 KB (65,536 bytes) of memory. The Intel 80286 introduced a second version of segmentation in 1982 that added support for virtual memory and memory protection. At this point the original mode was renamed to real mode, and the new version was named protected mode. The x86-64 architecture, introduced in 2003, has largely dropped support for segmentation in 64-bit mode.
In computing, protected mode, also called protected virtual address mode, is an operational mode of x86-compatible central processing units (CPUs). It allows system software to use features such as virtual memory, paging and safe multi-tasking designed to increase an operating system's control over application software.
x86 assembly language is the name for the family of assembly languages which provide some level of backward compatibility with CPUs back to the Intel 8008 microprocessor, which was launched in April 1972. It is used to produce object code for the x86 class of processors.

A general protection fault (GPF) in the x86 instruction set architectures (ISAs) is a fault initiated by ISA-defined protection mechanisms in response to an access violation caused by some running code, either in the kernel or a user program. The mechanism is first described in Intel manuals and datasheets for the Intel 80286 CPU, which was introduced in 1983; it is also described in section 9.8.13 in the Intel 80386 programmer's reference manual from 1986. A general protection fault is implemented as an interrupt. Some operating systems may also classify some exceptions not related to access violations, such as illegal opcode exceptions, as general protection faults, even though they have nothing to do with memory protection. If a CPU detects a protection violation, it stops executing the code and sends a GPF interrupt. In most cases, the operating system removes the failing process from the execution queue, signals the user, and continues executing other processes. If, however, the operating system fails to catch the general protection fault, i.e. another protection violation occurs before the operating system returns from the previous GPF interrupt, the CPU signals a double fault, stopping the operating system. If yet another failure occurs, the CPU is unable to recover; since 80286, the CPU enters a special halt state called "Shutdown", which can only be exited through a hardware reset. The IBM PC AT, the first PC-compatible system to contain an 80286, has hardware that detects the Shutdown state and automatically resets the CPU when it occurs. All descendants of the PC AT do the same, so in a PC, a triple fault causes an immediate system reset.
The x86 instruction set refers to the set of instructions that x86-compatible microprocessors support. The instructions are usually part of an executable program, often stored as a computer file and executed on the processor.
In computer systems programming, an interrupt handler, also known as an interrupt service routine or ISR, is a special block of code associated with a specific interrupt condition. Interrupt handlers are initiated by hardware interrupts, software interrupt instructions, or software exceptions, and are used for implementing device drivers or transitions between protected modes of operation, such as system calls.
In the 80386 microprocessor and later, virtual 8086 mode allows the execution of real mode applications that are incapable of running directly in protected mode while the processor is running a protected mode operating system. It is a hardware virtualization technique that allowed multiple 8086 processors to be emulated by the 386 chip. It emerged from the painful experiences with the 80286 protected mode, which by itself was not suitable to run concurrent real-mode applications well. John Crawford developed the Virtual Mode bit at the register set, paving the way to this environment.
The NX bit (no-execute) is a technology used in CPUs to segregate areas of memory for use by either storage of processor instructions or for storage of data, a feature normally only found in Harvard architecture processors. However, the NX bit is being increasingly used in conventional von Neumann architecture processors for security reasons.
The Popek and Goldberg virtualization requirements are a set of conditions sufficient for a computer architecture to support system virtualization efficiently. They were introduced by Gerald J. Popek and Robert P. Goldberg in their 1974 article "Formal Requirements for Virtualizable Third Generation Architectures". Even though the requirements are derived under simplifying assumptions, they still represent a convenient way of determining whether a computer architecture supports efficient virtualization and provide guidelines for the design of virtualized computer architectures.
In computing, a non-maskable interrupt (NMI) is a hardware interrupt that standard interrupt-masking techniques in the system cannot ignore. It typically occurs to signal attention for non-recoverable hardware errors. Some NMIs may be masked, but only by using proprietary methods specific to the particular NMI.
Jazelle DBX is an extension that allows some ARM processors to execute Java bytecode in hardware as a third execution state alongside the existing ARM and Thumb modes. Jazelle functionality was specified in the ARMv5TEJ architecture and the first processor with Jazelle technology was the ARM926EJ-S. Jazelle is denoted by a "J" appended to the CPU name, except for post-v5 cores where it is required for architecture conformance.
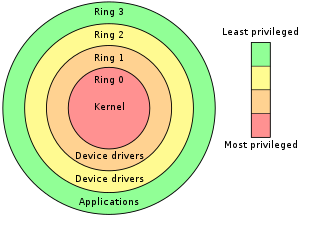
In computer science, hierarchical protection domains, often called protection rings, are mechanisms to protect data and functionality from faults and malicious behavior.
A Trace Vector Decoder (TVD) is computer software that uses the trace facility of its underlying microprocessor to decode encrypted instruction opcodes just-in-time prior to execution and possibly re-encode them afterwards. It can be used to hinder reverse engineering when attempting to prevent software cracking as part of an overall copy protection strategy.
The Cyrix coma bug is a design flaw in Cyrix 6x86, 6x86L, and early 6x86MX processors that allows a non-privileged program to hang the computer.
The FLAGS register is the status register that contains the current state of a x86 CPU. The size and meanings of the flag bits are architecture dependent. It usually reflects the result of arithmetic operations as well as information about restrictions placed on the CPU operation at the current time. Some of those restrictions may include preventing some interrupts from triggering, prohibition of execution of a class of "privileged" instructions. Additional status flags may bypass memory mapping and define what action the CPU should take on arithmetic overflow.
A control register is a processor register which changes or controls the general behavior of a CPU or other digital device. Common tasks performed by control registers include interrupt control, switching the addressing mode, paging control, and coprocessor control.
The 65xx family of microprocessors, consisting of the MOS Technology 6502 and its derivatives, the WDC 65C02, WDC 65C802 and WDC 65C816, and CSG 65CE02, all handle interrupts in a similar fashion. There are three hardware interrupt signals common to all 65xx processors and one software interrupt, the BRK instruction. The WDC 65C816 adds a fourth hardware interrupt—ABORT, useful for implementing virtual memory architectures—and the COP software interrupt instruction, intended for use in a system with a coprocessor of some type.
A trap flag permits operation of a processor in single-step mode. If such a flag is available, debuggers can use it to step through the execution of a computer program.