Pulse compression is a signal processing technique commonly used by radar, sonar and echography to either increase the range resolution when pulse length is constrained or increase the signal to noise ratio when the peak power and the bandwidth (or equivalently range resolution) of the transmitted signal are constrained. This is achieved by modulating the transmitted pulse and then correlating the received signal with the transmitted pulse.[1]
The ideal model for the simplest, and historically first type of signals a pulse radar or sonar can transmit is a truncated sinusoidal pulse (also called a CW --carrier wave-- pulse), of amplitude and carrier frequency, , truncated by a rectangular function of width, . The pulse is transmitted periodically, but that is not the main topic of this article; we will consider only a single pulse, . If we assume the pulse to start at time , the signal can be written the following way, using the complex notation:
Range resolution
Let us determine the range resolution which can be obtained with such a signal. The return signal, written , is an attenuated and time-shifted copy of the original transmitted signal (in reality, Doppler effect can play a role too, but this is not important here.) There is also noise in the incoming signal, both on the imaginary and the real channel. The noise is assumed to be band-limited, that is to have frequencies only in (this generally holds in reality, where a bandpass filter is generally used as one of the first stages in the reception chain); we write to denote that noise. To detect the incoming signal, a matched filter is commonly used. This method is optimal when a known signal is to be detected among additive noise having a normal distribution.
In other words, the cross-correlation of the received signal with the transmitted signal is computed. This is achieved by convolving the incoming signal with a conjugated and time-reversed version of the transmitted signal. This operation can be done either in software or with hardware. We write for this cross-correlation. We have:
If the reflected signal comes back to the receiver at time and is attenuated by factor , this yields:
Since we know the transmitted signal, we obtain:
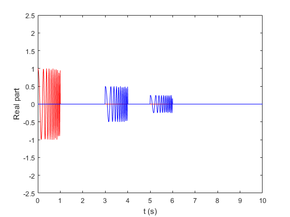
where , is the result of the intercorrelation between the noise and the transmitted signal. Function is the triangle function, its value is 0 on , it increases linearly on where it reaches its maximum 1, and it decreases linearly on until it reaches 0 again. Figures at the end of this paragraph show the shape of the intercorrelation for a sample signal (in red), in this case a real truncated sine, of duration seconds, of unit amplitude, and frequency hertz. Two echoes (in blue) come back with delays of 3 and 5 seconds and amplitudes equal to 0.5 and 0.3 times the amplitude of the transmitted pulse, respectively; these are just random values for the sake of the example. Since the signal is real, the intercorrelation is weighted by an additional 1⁄2 factor.
If two pulses come back (nearly) at the same time, the intercorrelation is equal to the sum of the intercorrelations of the two elementary signals. To distinguish one "triangular" envelope from that of the other pulse, it is clearly visible that the times of arrival of the two pulses must be separated by at least so that the maxima of both pulses can be separated. If this condition is not met, both triangles will be mixed together and impossible to separate.
Since the distance travelled by a wave during is (where c is the speed of the wave in the medium), and since this distance corresponds to a round-trip time, we get:
Result 1
The range resolution with a sinusoidal pulse is where is the pulse Duration and, , the speed of the wave.
Conclusion: to increase the resolution, the pulse length must be reduced.
Example (simple impulsion): transmitted signal in red (carrier 10 hertz, amplitude 1, duration 1 second) and two echoes (in blue).
Before matched filtering
After matched filtering
If the targets are separated enough...
...echoes can be distinguished.
If the targets are too close...
...the echoes are mixed together.
Energy and signal-to-noise ratio of the received signal
The instantaneous power of the received pulse is . The energy put into that signal is:
If is the standard deviation of the noise which is assumed to have the same bandwidth as the signal, the signal-to-noise ratio (SNR) at the receiver is:
The SNR is proportional to pulse duration , if other parameters are held constant. This introduces a tradeoff: increasing improves the SNR, but reduces the resolution, and vice versa.
Pulse compression by linear frequency modulation (or chirping)
Basic principles
How can one have a large enough pulse (to still have a good SNR at the receiver) without poor resolution? This is where pulse compression enters the picture. The basic principle is the following:
a signal is transmitted, with a long enough length so that the energy budget is correct
this signal is designed so that after matched filtering, the width of the intercorrelated signals is smaller than the width obtained by the standard sinusoidal pulse, as explained above (hence the name of the technique: pulse compression).
In radar or sonar applications, linear chirps are the most typically used signals to achieve pulse compression. The pulse being of finite length, the amplitude is a rectangle function. If the transmitted signal has a duration , begins at and linearly sweeps the frequency band centered on carrier , it can be written:
The chirp definition above means that the phase of the chirped signal (that is, the argument of the complex exponential), is the quadratic:
thus the instantaneous frequency is (by definition):
which is the intended linear ramp going from at to at .
The relation of phase to frequency is often used in the other direction, starting with the desired and writing the chirp phase via the integration of frequency:
This transmitted signal is typically reflected by the target and undergoes attenuation due to various causes, so the received signal is a time-delayed, attenuated version of the transmitted signal plus an additive noise of constant power spectral density on , and zero everywhere else:
Cross-correlation between the transmitted and the received signal
We now endeavor to compute the correlation of the received signal with the transmitted signals. Two actions are going to be taken to do this:
- The first action is a simplification. Instead of computing the cross-correlation we are going to compute an auto-correlation which amounts to assuming that the autocorrelation peak is centered at zero. This will not change the resolution and the amplitudes but will simplify the math:
- The second action is, as shown below, is to set an amplitude for the reference signal which is not one, but . Constant is to be determined so that energy is conserved through correlation.
Now, it can be shown[2] that the correlation function of with is:
where is the correlation of the reference signal with the received noise.
Width of the signal after correlation
Assuming noise is zero, the maximum of the autocorrelation function of is reached at 0. Around 0, this function behaves as the sinc (or cardinal sine) term, defined here as . The −3dB temporal width of that cardinal sine is more or less equal to . Everything happens as if, after matched filtering, we had the resolution that would have been reached with a simple pulse of duration . For the common values of , is smaller than , hence the pulse compression name.
Since the cardinal sine can have annoying sidelobes, a common practice is to filter the result by a window (Hamming, Hann, etc.). In practice, this can be done at the same time as the adapted filtering by multiplying the reference chirp with the filter. The result will be a signal with a slightly lower maximum amplitude, but the sidelobes will be filtered out, which is more important.
Result 2
The distance resolution reachable with a linear frequency modulation of a pulse on a bandwidth is: where is the speed of the wave.
Definition
Ratio is the pulse compression ratio. It is generally greater than 1 (usually, its value is 20 to 30).
Example (chirped pulse): transmitted signal in red (carrier 10 hertz, modulation on 16 hertz, amplitude 1, duration 1 second) and two echoes (in blue).
Before matched filtering: the echoes are long and have a low amplitude
After matched filtering: the echoes are shorter in time and have a higher peak power.
Energy and peak power after correlation
When the reference signal is correctly scaled using term , then it is possible to conserve the energy before and after correlation. The peak (and average) power before correlation is:
Since, before compression, the pulse is box-shaped, the energy before correlation is:
The peak power after correlation is reached at :
Note that if this peak power is the energy of the received signal before correlation, which is as expected. After compression, the pulse is approximal by a box having a width equal to the typical width of the function, that is, a width , so the energy after correlation is:
If energy is conserved:
... it comes that: so that the peak power after correlation is:
As a conclusion, the peak power of the pulse-compressed signal is that of the raw received signal (assuming that the template is correctly scaled to conserve energy through correlation).
Signal-to-noise gain after correlation
Equivalence between a chirped pulse and a shorter CW pulse after pulse compression. Energy is the area under the blue curves (in the time domain); power is the area under the red curves (in the spectral domain).
As we have seen above, things are written so that the energy of the signal does not vary during pulse compression. However, it is now located in the main lobe of the cardinal sine, whose width is approximately . If is the power of the signal before compression, and the power of the signal after compression, energy is conserved and we have:
which yields an increase in power after pulse compression:
In the spectral domain, the power spectrum of the chirp has a nearly constant spectral density in interval and zero elsewhere, so that energy is equivalently expressed as . This spectral density remains the same after matched filtering.
Imagining now an equivalent sinusoidal (CW) pulse of duration and identical input power, this equivalent sinusoidal pulse has an energy:
After matched filtering, the equivalent sinusoidal pulse turns into a triangular-shaped signal of twice its original width but the same peak power. Energy is conserved. The spectral domain is approximated by a nearly constant spectral density in interval where . Through conservation of energy, we have:
Since by definition we also have: it comes that: meaning that the spectral densities of the chirped pulse, and the equivalent CW pulse are very nearly identical, and are equivalent to that of a bandpass filter on . The filtering effect of correlation also acts on the noise, meaning that the reference band for the noise is and since , the same filtering effect is obtained on the noise in both cases after correlation. This means that the net effect of pulse compression is that, compared to the equivalent CW pulse, the signal-to-noise ratio (SNR) has improved by a factor because the signal is amplified but not the noise.
As a consequence:
Result 3
After pulse compression, the signal-to-noise ratio can be considered as being amplified by as compared to the baseline situation of a continuous-wave pulse of duration and the same amplitude as the chirp-modulated signal before compression, where the received signal and noise have (implicitly) undergone a bandpass filtering on . This additional gain can be injected into the radar equation.
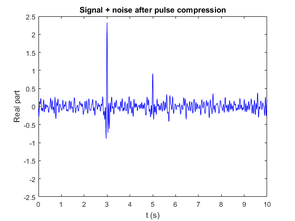
Example: same signals as above, plus an additive white Gaussian having undergone bandpass filtering (standard deviation of real part: 0.125 after filtering). After correlation, the power of the noise is unchanged. The signal itself is amplified by a factor four (or 16 for the power, as predicted by theory).
Before matched filtering: the signal is hidden in noise
After matched filtering: echoes become visible.
For technical reasons, correlation is not necessarily done for actual received CW pulses as for chirped pulses. However during baseband shifting the signal undergoes a bandpass filtering on which has the same net effect on the noise as the correlation, so the overall reasoning remains the same (that is, the SNR makes only sense for noise defined on a given bandwidth, here being that of the signal).
This gain in the SNR seems magical, but remember that the power spectral density does not represent the phase of the signal. In reality the phases are different for the equivalent CW pulse, the CW pulse after correlation, the original chirped pulse and the correlated chirped pulse, which explains the different shapes of the signals (especially the varying lengths) despite having (nearly) the same power spectrum in all cases. If the peak transmitting power and the bandwidth are constrained, pulse compression thus achieves a better peak power (but same resolution) by transmitting a longer pulse (that is, more energy), compared to an equivalent CW pulse of same peak power and bandwidth , and squeezing the pulse by correlation. This works best only for a limited number of signal types which, after correlation, have a narrower peak than the original signal, and low sidelobes.
Stretch processing
While pulse compression can ensure good SNR and fine range resolution in the same time, digital signal processing in such a system can be difficult to implement because of the high instantaneous bandwidth of the waveform ( can be hundreds of megahertz or even exceed 1GHz.) Stretch Processing is a technique for matched filtering of wideband chirping waveform and is suitable for applications seeking very fine range resolution over relatively short range intervals.[3]
Stretch processing
Picture above shows the scenario for analyzing stretch processing. The central reference point(CRP) is in the middle of the range window of interest at range of , corresponding to a time delay of .
If the transmitted waveform is the chirp waveform:
then the echo from the target at distance can be expressed as:
where is proportional to the scatterer reflectivity. We then multiply the echo by and the echo will become:
where is the wavelength of electromagnetic wave in air.
After conducting sampling and discrete Fourier transform on y(t) the sinusoid frequency can be solved:
and the differential range can be obtained:
To show that the bandwidth of y(t) is less than the original signal bandwidth , we suppose that the range window is long. If the target is at the lower bound of the range window, the echo will arrive seconds after transmission; similarly, If the target is at the upper bound of the range window, the echo will arrive seconds after transmission. The differential arrive time for each case is and , respectively.
We can then obtain the bandwidth by considering the difference in sinusoid frequency for targets at the lower and upper bound of the range window:
As a consequence:
Result 4
Through stretch processing, the bandwidth at the receiver output is less than the original signal bandwidth if , thereby facilitating the implementation of DSP system in a linear-frequency-modulation radar system.
To demonstrate that stretch processing preserves range resolution, we need to understand that y(t) is actually an impulse train with pulse duration T and period , which is equal to the period of the transmitted impulse train. As a result, the Fourier transform of y(t) is actually a sinc function with Rayleigh resolution. That is, the processor will be able to resolve scatterers whose are at least apart.
Consequently,
and,
which is the same as the resolution of the original linear frequency modulation waveform.
Stepped-frequency waveform
Although stretch processing can reduce the bandwidth of received baseband signal, all of the analog components in RF front-end circuitry still must be able to support an instantaneous bandwidth of . In addition, the effective wavelength of the electromagnetic wave changes during the frequency sweep of a chirp signal, and therefore the antenna look direction will be inevitably changed in a Phased array system.
Stepped-frequency waveforms are an alternative technique that can preserve fine range resolution and SNR of the received signal without large instantaneous bandwidth. Unlike the chirping waveform, which sweeps linearly across a total bandwidth of in a single pulse, stepped-frequency waveform employs an impulse train where the frequency of each pulse is increased by from the preceding pulse. The baseband signal can be expressed as:
where is a rectangular impulse of length and M is the number of pulses in a single pulse train. The total bandwidth of the waveform is still equal to , but the analog components can be reset to support the frequency of the following pulse during the time between pulses. As a result, the problem mentioned above can be avoided.
To calculate the distance of the target corresponding to a delay , individual pulses are processed through the simple pulse matched filter:
and the output of the matched filter is:
where
If we sample at , we can get:
where l means the range bin l. Conduct DTFT (m is served as time here) and we can get:
,and the peak of the summation occurs when .
Consequently, the DTFT of provides a measure of the delay of the target relative to the range bin delay :
and the differential range can be obtained:
where c is the speed of light.
To demonstrate stepped-frequency waveform preserves range resolution, it should be noticed that is a sinc-like function, and therefore it has a Rayleigh resolution of . As a result:
and therefore the differential range resolution is:
which is the same of the resolution of the original linear-frequency-modulation waveform.
Pulse compression by phase coding
There are other means to modulate the signal. Phase modulation is a commonly used technique; in this case, the pulse is divided in time slots of duration for which the phase at the origin is chosen according to a pre-established convention. For instance, it is possible to not change the phase for some time slots (which comes down to just leaving the signal as it is, in those slots) and de-phase the signal in the other slots by (which is equivalent of changing the sign of the signal); this is known as binary phase-shift keying. The precise way of choosing the sequence of phases can be done according to a technique known as Barker codes.
The advantages[4] of the Barker codes are their simplicity (as indicated above, a de-phasing is a simple sign change), but the pulse compression ratio is lower than in the chirp case and the compression is very sensitive to frequency changes due to the Doppler effect if that change is larger than .
Other pseudorandom binary sequences have nearly optimal pulse compression properties, such as Gold codes, JPL codes or Kasami codes, because their autocorrelation peak is very narrow. These sequences have other interesting properties making them suitable for GNSS positioning, for instance.
It is possible to code the sequence on more than two phases (polyphase coding). As with a linear chirp, pulse compression is achieved through intercorrelation.
↑ J. R. Klauder, A. C, Price, S. Darlington and W. J. Albersheim, ‘The Theory and Design of Chirp Radars,” Bell System Technical Journal 39, 745 (1960).
↑ Achim Hein, Processing of SAR Data: Fundamentals, Signal Processing, Interferometry, Springer, 2004, ISBN3-540-05043-4, pages 38 to 44. Very rigorous demonstration of the autocorrelation function of a chirp. The author works with real chirps, hence the factor of 1⁄2 in his book, which is not used here.
↑ Richards, Mark A. 2014. Fundamentals of radar signal processing. New York [etc.]: McGraw-Hill Education.
↑ J.-P. Hardange, P. Lacomme, J.-C. Marchais, Radars aéroportés et spatiaux, Masson, Paris, 1995, ISBN2-225-84802-5, page 104. Available in English: Air and Spaceborne Radar Systems: an introduction, Institute of Electrical Engineers, 2001, ISBN0-85296-981-3
Further reading
Nadav Levanon, and Eli Mozeson. Radar signals. Wiley. com, 2004.
Fulvio Gini, Antonio De Maio, and Lee Patton, eds. Waveform design and diversity for advanced radar systems. Institution of engineering and technology, 2012.
John J. Benedetto, Ioannis Konstantinidis, and Muralidhar Rangaswamy. "Phase-coded waveforms and their design." IEEE Signal Processing Magazine, 26.1 (2009): 22-31.
Ducoff, Michael R., and Byron W. Tietjen. "Pulse compression radar." Radar Handbook (2008): 8-3.
Related Research Articles
Frequency modulation (FM) is the encoding of information in a carrier wave by varying the instantaneous frequency of the wave. The technology is used in telecommunications, radio broadcasting, signal processing, and computing.
In fluid mechanics, the Grashof number is a dimensionless number which approximates the ratio of the buoyancy to viscous forces acting on a fluid. It frequently arises in the study of situations involving natural convection and is analogous to the Reynolds number.
A chirp is a signal in which the frequency increases (up-chirp) or decreases (down-chirp) with time. In some sources, the term chirp is used interchangeably with sweep signal. It is commonly applied to sonar, radar, and laser systems, and to other applications, such as in spread-spectrum communications. This signal type is biologically inspired and occurs as a phenomenon due to dispersion. It is usually compensated for by using a matched filter, which can be part of the propagation channel. Depending on the specific performance measure, however, there are better techniques both for radar and communication. Since it was used in radar and space, it has been adopted also for communication standards. For automotive radar applications, it is usually called linear frequency modulated waveform (LFMW).
In mathematics and physics, the heat equation is a certain partial differential equation. Solutions of the heat equation are sometimes known as caloric functions. The theory of the heat equation was first developed by Joseph Fourier in 1822 for the purpose of modeling how a quantity such as heat diffuses through a given region.
The short-time Fourier transform (STFT), is a Fourier-related transform used to determine the sinusoidal frequency and phase content of local sections of a signal as it changes over time. In practice, the procedure for computing STFTs is to divide a longer time signal into shorter segments of equal length and then compute the Fourier transform separately on each shorter segment. This reveals the Fourier spectrum on each shorter segment. One then usually plots the changing spectra as a function of time, known as a spectrogram or waterfall plot, such as commonly used in software defined radio (SDR) based spectrum displays. Full bandwidth displays covering the whole range of an SDR commonly use fast Fourier transforms (FFTs) with 2^24 points on desktop computers.
In theoretical physics, the Batalin–Vilkovisky (BV) formalism was developed as a method for determining the ghost structure for Lagrangian gauge theories, such as gravity and supergravity, whose corresponding Hamiltonian formulation has constraints not related to a Lie algebra. The BV formalism, based on an action that contains both fields and "antifields", can be thought of as a vast generalization of the original BRST formalism for pure Yang–Mills theory to an arbitrary Lagrangian gauge theory. Other names for the Batalin–Vilkovisky formalism are field-antifield formalism, Lagrangian BRST formalism, or BV–BRST formalism. It should not be confused with the Batalin–Fradkin–Vilkovisky (BFV) formalism, which is the Hamiltonian counterpart.
A vibration in a string is a wave. Resonance causes a vibrating string to produce a sound with constant frequency, i.e. constant pitch. If the length or tension of the string is correctly adjusted, the sound produced is a musical tone. Vibrating strings are the basis of string instruments such as guitars, cellos, and pianos.
In pulsed radar and sonar signal processing, an ambiguity function is a two-dimensional function of propagation delay and Doppler frequency , . It represents the distortion of a returned pulse due to the receiver matched filter of the return from a moving target. The ambiguity function is defined by the properties of the pulse and of the filter, and not any particular target scenario.
Continuous-wave radar is a type of radar system where a known stable frequency continuous wave radio energy is transmitted and then received from any reflecting objects. Individual objects can be detected using the Doppler effect, which causes the received signal to have a different frequency from the transmitted signal, allowing it to be detected by filtering out the transmitted frequency.
In digital modulation, minimum-shift keying (MSK) is a type of continuous-phase frequency-shift keying that was developed in the late 1950s by Collins Radio employees Melvin L. Doelz and Earl T. Heald. Similar to OQPSK, MSK is encoded with bits alternating between quadrature components, with the Q component delayed by half the symbol period.
In theoretical physics, Nordström's theory of gravitation was a predecessor of general relativity. Strictly speaking, there were actually two distinct theories proposed by the Finnish theoretical physicist Gunnar Nordström, in 1912 and 1913 respectively. The first was quickly dismissed, but the second became the first known example of a metric theory of gravitation, in which the effects of gravitation are treated entirely in terms of the geometry of a curved spacetime.
The raised-cosine filter is a filter frequently used for pulse-shaping in digital modulation due to its ability to minimise intersymbol interference (ISI). Its name stems from the fact that the non-zero portion of the frequency spectrum of its simplest form is a cosine function, 'raised' up to sit above the (horizontal) axis.
In information theory, information dimension is an information measure for random vectors in Euclidean space, based on the normalized entropy of finely quantized versions of the random vectors. This concept was first introduced by Alfréd Rényi in 1959.
Time-domain thermoreflectance is a method by which the thermal properties of a material can be measured, most importantly thermal conductivity. This method can be applied most notably to thin film materials, which have properties that vary greatly when compared to the same materials in bulk. The idea behind this technique is that once a material is heated up, the change in the reflectance of the surface can be utilized to derive the thermal properties. The reflectivity is measured with respect to time, and the data received can be matched to a model with coefficients that correspond to thermal properties.
Surface-extended X-ray absorption fine structure (SEXAFS) is the surface-sensitive equivalent of the EXAFS technique. This technique involves the illumination of the sample by high-intensity X-ray beams from a synchrotron and monitoring their photoabsorption by detecting in the intensity of Auger electrons as a function of the incident photon energy. Surface sensitivity is achieved by the interpretation of data depending on the intensity of the Auger electrons instead of looking at the relative absorption of the X-rays as in the parent method, EXAFS.
In mathematics, the Bussgang theorem is a theorem of stochastic analysis. The theorem states that the cross-correlation between a Gaussian signal before and after it has passed through a nonlinear operation are equal to the signals auto-correlation up to a constant. It was first published by Julian J. Bussgang in 1952 while he was at the Massachusetts Institute of Technology.
In quantum information theory, the classical capacity of a quantum channel is the maximum rate at which classical data can be sent over it error-free in the limit of many uses of the channel. Holevo, Schumacher, and Westmoreland proved the following least upper bound on the classical capacity of any quantum channel :
The spectrum of a chirp pulse describes its characteristics in terms of its frequency components. This frequency-domain representation is an alternative to the more familiar time-domain waveform, and the two versions are mathematically related by the Fourier transform. The spectrum is of particular interest when pulses are subject to signal processing. For example, when a chirp pulse is compressed by its matched filter, the resulting waveform contains not only a main narrow pulse but, also, a variety of unwanted artifacts many of which are directly attributable to features in the chirp's spectral characteristics.
The chirp pulse compression process transforms a long duration frequency-coded pulse into a narrow pulse of greatly increased amplitude. It is a technique used in radar and sonar systems because it is a method whereby a narrow pulse with high peak power can be derived from a long duration pulse with low peak power. Furthermore, the process offers good range resolution because the half-power beam width of the compressed pulse is consistent with the system bandwidth.
Carrier frequency offset (CFO) is one of many non-ideal conditions that may affect in baseband receiver design. In designing a baseband receiver, we should notice not only the degradation invoked by non-ideal channel and noise, we should also regard RF and analog parts as the main consideration. Those non-idealities include sampling clock offset, IQ imbalance, power amplifier, phase noise and carrier frequency offset nonlinearity.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.