In mathematics, an associative algebraA over a commutative ring K is a ring A together with a ring homomorphism from K into the center of A. This is thus an algebraic structure with an addition, a multiplication, and a scalar multiplication. The addition and multiplication operations together give A the structure of a ring; the addition and scalar multiplication operations together give A the structure of a module or vector space over K. In this article we will also use the term K-algebra to mean an associative algebra over K. A standard first example of a K-algebra is a ring of square matrices over a commutative ring K, with the usual matrix multiplication.
In algebra, a division ring, also called a skew field, is a nontrivial ring in which division by nonzero elements is defined. Specifically, it is a nontrivial ring in which every nonzero element a has a multiplicative inverse, that is, an element usually denoted a–1, such that a a–1 = a–1 a = 1. So, (right) division may be defined as a / b = a b–1, but this notation is avoided, as one may have a b–1 ≠ b–1 a.
In mathematics, and more specifically in linear algebra, a linear map is a mapping between two vector spaces that preserves the operations of vector addition and scalar multiplication. The same names and the same definition are also used for the more general case of modules over a ring; see Module homomorphism.

Linear algebra is the branch of mathematics concerning linear equations such as:
In mathematics, a product is the result of multiplication, or an expression that identifies objects to be multiplied, called factors. For example, 21 is the product of 3 and 7, and is the product of and . When one factor is an integer, the product is called a multiple.

In mathematics and physics, a vector space is a set whose elements, often called vectors, may be added together and multiplied ("scaled") by numbers called scalars. Scalars are often real numbers, but can be complex numbers or, more generally, elements of any field. The operations of vector addition and scalar multiplication must satisfy certain requirements, called vector axioms. Real vector space and complex vector space are kinds of vector spaces based on different kinds of scalars: real coordinate space or complex coordinate space.
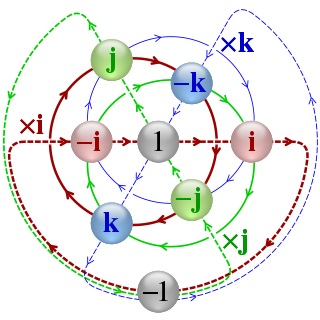
In mathematics, the quaternion number system extends the complex numbers. Quaternions were first described by the Irish mathematician William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space. The algebra of quaternions is often denoted by H, or in blackboard bold by Although multiplication of quaternions is noncommutative, it gives a definition of the quotient of two vectors in a three-dimensional space. Quaternions are generally represented in the form

In mathematics, the general linear group of degree n is the set of n×n invertible matrices, together with the operation of ordinary matrix multiplication. This forms a group, because the product of two invertible matrices is again invertible, and the inverse of an invertible matrix is invertible, with the identity matrix as the identity element of the group. The group is so named because the columns of an invertible matrix are linearly independent, hence the vectors/points they define are in general linear position, and matrices in the general linear group take points in general linear position to points in general linear position.
In mathematics, an algebra over a field is a vector space equipped with a bilinear product. Thus, an algebra is an algebraic structure consisting of a set together with operations of multiplication and addition and scalar multiplication by elements of a field and satisfying the axioms implied by "vector space" and "bilinear".
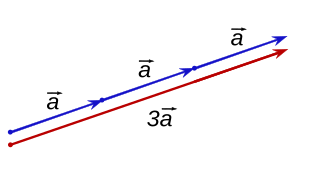
In mathematics, scalar multiplication is one of the basic operations defining a vector space in linear algebra. In common geometrical contexts, scalar multiplication of a real Euclidean vector by a positive real number multiplies the magnitude of the vector without changing its direction. Scalar multiplication is the multiplication of a vector by a scalar, and is to be distinguished from inner product of two vectors.
In mathematics, a bilinear form is a bilinear map V × V → K on a vector space V over a field K. In other words, a bilinear form is a function B : V × V → K that is linear in each argument separately:
In mathematics, the complexification of a vector space V over the field of real numbers yields a vector space VC over the complex number field, obtained by formally extending the scaling of vectors by real numbers to include their scaling ("multiplication") by complex numbers. Any basis for V may also serve as a basis for VC over the complex numbers.
In abstract algebra, a representation of an associative algebra is a module for that algebra. Here an associative algebra is a ring. If the algebra is not unital, it may be made so in a standard way ; there is no essential difference between modules for the resulting unital ring, in which the identity acts by the identity mapping, and representations of the algebra.
This page lists some examples of vector spaces. See vector space for the definitions of terms used on this page. See also: dimension, basis.
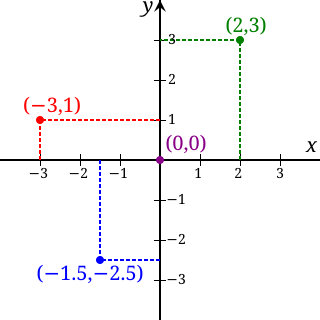
In mathematics, the real coordinate space or real coordinate n-space, of dimension n, denoted Rn or , is the set of the n-tuples of real numbers, that is the set of all sequences of n real numbers. Special cases are called the real lineR1, the real coordinate planeR2, and the real coordinate three-dimensional spaceR3. With component-wise addition and scalar multiplication, it is a real vector space, and its elements are called coordinate vectors.
In mathematics, the split-octonions are an 8-dimensional nonassociative algebra over the real numbers. Unlike the standard octonions, they contain non-zero elements which are non-invertible. Also the signatures of their quadratic forms differ: the split-octonions have a split signature (4,4) whereas the octonions have a positive-definite signature (8,0).

In mathematics, a matrix is a rectangular array or table of numbers, symbols, or expressions, arranged in rows and columns, which is used to represent a mathematical object or a property of such an object.
In mathematics and physics, vector is a term that refers colloquially to some quantities that cannot be expressed by a single number, or to elements of some vector spaces.
In mathematics, particularly in linear algebra and applications, matrix analysis is the study of matrices and their algebraic properties. Some particular topics out of many include; operations defined on matrices, functions of matrices, and the eigenvalues of matrices.
This is a glossary of linear algebra.



