
The Defense Advanced Research Projects Agency (DARPA) is a research and development agency of the United States Department of Defense responsible for the development of emerging technologies for use by the military.
Subsumption architecture is a reactive robotic architecture heavily associated with behavior-based robotics which was very popular in the 1980s and 90s. The term was introduced by Rodney Brooks and colleagues in 1986. Subsumption has been widely influential in autonomous robotics and elsewhere in real-time AI.

James Sacra Albus was an American engineer, Senior NIST Fellow and founder and former chief of the Intelligent Systems Division of the Manufacturing Engineering Laboratory at the National Institute of Standards and Technology (NIST).

An unmanned ground vehicle (UGV) is a vehicle that operates while in contact with the ground and without an onboard human presence. UGVs can be used for many applications where it may be inconvenient, dangerous, or impossible to have a human operator present. Generally, the vehicle will have a set of sensors to observe the environment, and will either autonomously make decisions about its behavior or pass the information to a human operator at a different location who will control the vehicle through teleoperation.

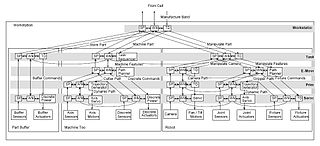
IDEF0, a compound acronym, is a function modeling methodology for describing manufacturing functions, which offers a functional modeling language for the analysis, development, reengineering and integration of information systems, business processes or software engineering analysis.

Stanley is an autonomous car created by Stanford University's Stanford Racing Team in cooperation with the Volkswagen Electronics Research Laboratory (ERL). It won the 2005 DARPA Grand Challenge, earning the Stanford Racing Team a $2 million prize.
Hybrid intelligent system denotes a software system which employs, in parallel, a combination of methods and techniques from artificial intelligence subfields, such as:
In robotics, a robotic paradigm is a mental model of how a robot operates. A robotic paradigm can be described by the relationship between the three basic elements of robotics: Sensing, Planning, and Acting. It can also be described by how sensory data is processed and distributed through the system, and where decisions are made.

Brake-by-wire technology in the automotive industry is the ability to control brakes through electronic means, without a mechanical connection that transfers force to the physical braking system from a driver input apparatus such as a pedal or lever.
A hierarchical control system (HCS) is a form of control system in which a set of devices and governing software is arranged in a hierarchical tree. When the links in the tree are implemented by a computer network, then that hierarchical control system is also a form of networked control system.

The Real-time Control System (RCS) is a software system developed by NIST based on the Real-time Control System Reference Model Architecture, that implements a generic Hierarchical control system. The RCS Software Library is an archive of free C++, Java and Ada code, scripts, tools, makefiles, and documentation developed to aid programmers of software to be used in real-time control systems.
Psi-theory, developed by Dietrich Dörner at the University of Bamberg, is a systemic psychological theory covering human action regulation, intention selection and emotion. It models the human mind as an information processing agent, controlled by a set of basic physiological, social and cognitive drives. Perceptual and cognitive processing are directed and modulated by these drives, which allow the autonomous establishment and pursuit of goals in an open environment.

The Heterogeneous Aerial Reconnaissance Team (HART)—formerly known as the "Heterogeneous Urban RSTA Team (HURT)"—program was an aerial surveillance project funded by the Information Processing Technology Office of the Defense Advanced Research Projects Agency with program managers John Bay and Michael Pagels. The purpose of the program was to develop systems that could provide continuous, real-time, three-dimensional surveillance of large urbanized areas, using unmanned aerial vehicles. The project team was led by Northrop Grumman Corporation, and involved several other academic and corporate researchers.
Real-time Control System (RCS) is a reference model architecture, suitable for many software-intensive, real-time computing control problem domains. It defines the types of functions needed in a real-time intelligent control system, and how these functions relate to each other.
The following outline is provided as an overview of and topical guide to robotics:

The ASW Continuous Trail Unmanned Vessel (ACTUV) is a DARPA funded project launched in early 2010 to develop an anti-submarine drone. ASW is an acronym for Anti-Submarine Warfare. In January 2018 after successful sea trials it was announced that the "Sea Hunter" prototype has transitioned from DARPA to the Office of Naval Research for further development.
The Learning Applied to Ground Vehicles (LAGR) program, which ran from 2004 until 2008, had the goal of accelerating progress in autonomous, perception-based, off-road navigation in robotic unmanned ground vehicles (UGVs). LAGR was funded by DARPA, a research agency of the United States Department of Defense.
An autonomous aircraft is an aircraft which flies under the control of automatic systems and needs no intervention from a human pilot. Most autonomous aircraft are unmanned aerial vehicle or drones. However, autonomous control systems are reaching a point where several air taxis and associated regulatory regimes are being developed.
Gazebo is an open-source 3D robotics simulator. It integrated the ODE physics engine, OpenGL rendering, and support code for sensor simulation and actuator control.
The Internet of Military Things (IoMT) is a class of Internet of things for combat operations and warfare. It is a complex network of interconnected entities, or "things", in the military domain that continually communicate with each other to coordinate, learn, and interact with the physical environment to accomplish a broad range of activities in a more efficient and informed manner. The concept of IoMT is largely driven by the idea that future military battles will be dominated by machine intelligence and cyber warfare and will likely take place in urban environments. By creating a miniature ecosystem of smart technology capable of distilling sensory information and autonomously governing multiple tasks at once, the IoMT is conceptually designed to offload much of the physical and mental burden that warfighters encounter in a combat setting.





