Related Research Articles
Distributed computing is a field of computer science that studies distributed systems, defined as computer systems whose inter-communicating components are located on different networked computers.
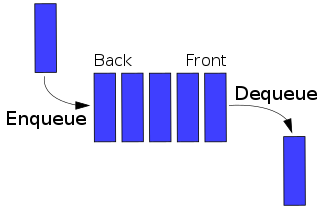
In computing and in systems theory, first in, first out, acronymized as FIFO, is a method for organizing the manipulation of a data structure where the oldest (first) entry, or "head" of the queue, is processed first.

In digital computers, an interrupt is a request for the processor to interrupt currently executing code, so that the event can be processed in a timely manner. If the request is accepted, the processor will suspend its current activities, save its state, and execute a function called an interrupt handler to deal with the event. This interruption is often temporary, allowing the software to resume normal activities after the interrupt handler finishes, although the interrupt could instead indicate a fatal error.

Symmetric multiprocessing or shared-memory multiprocessing (SMP) involves a multiprocessor computer hardware and software architecture where two or more identical processors are connected to a single, shared main memory, have full access to all input and output devices, and are controlled by a single operating system instance that treats all processors equally, reserving none for special purposes. Most multiprocessor systems today use an SMP architecture. In the case of multi-core processors, the SMP architecture applies to the cores, treating them as separate processors.
Direct memory access (DMA) is a feature of computer systems that allows certain hardware subsystems to access main system memory independently of the central processing unit (CPU).

Static random-access memory is a type of random-access memory (RAM) that uses latching circuitry (flip-flop) to store each bit. SRAM is volatile memory; data is lost when power is removed.
In automata theory, sequential logic is a type of logic circuit whose output depends on the present value of its input signals and on the sequence of past inputs, the input history. This is in contrast to combinational logic, whose output is a function of only the present input. That is, sequential logic has state (memory) while combinational logic does not.
Futurebus is a computer bus standard designed to replace all local bus connections in a computer, including the CPU, plug-in cards, and even some LAN links between machines. The project started in 1979 and was completed in 1987, but then went through a redesign until 1994. It has seen little real-world use, although custom implementations are still designed.

In electronics and especially synchronous digital circuits, a clock signal is an electronic logic signal which oscillates between a high and a low state at a constant frequency and is used like a metronome to synchronize actions of digital circuits. In a synchronous logic circuit, the most common type of digital circuit, the clock signal is applied to all storage devices, flip-flops and latches, and causes them all to change state simultaneously, preventing race conditions.

The front-side bus (FSB) is a computer communication interface (bus) that was often used in Intel-chip-based computers during the 1990s and 2000s. The EV6 bus served the same function for competing AMD CPUs. Both typically carry data between the central processing unit (CPU) and a memory controller hub, known as the northbridge.

A system bus is a single computer bus that connects the major components of a computer system, combining the functions of a data bus to carry information, an address bus to determine where it should be sent or read from, and a control bus to determine its operation. The technique was developed to reduce costs and improve modularity, and although popular in the 1970s and 1980s, more modern computers use a variety of separate buses adapted to more specific needs.

The Q-bus, also known as the LSI-11 Bus, is one of several bus technologies used with PDP and MicroVAX computer systems previously manufactured by the Digital Equipment Corporation of Maynard, Massachusetts.
In digital electronics, a synchronous circuit is a digital circuit in which the changes in the state of memory elements are synchronized by a clock signal. In a sequential digital logic circuit, data is stored in memory devices called flip-flops or latches. The output of a flip-flop is constant until a pulse is applied to its "clock" input, upon which the input of the flip-flop is latched into its output. In a synchronous logic circuit, an electronic oscillator called the clock generates a string (sequence) of pulses, the "clock signal". This clock signal is applied to every storage element, so in an ideal synchronous circuit, every change in the logical levels of its storage components is simultaneous. Ideally, the input to each storage element has reached its final value before the next clock occurs, so the behaviour of the whole circuit can be predicted exactly. Practically, some delay is required for each logical operation, resulting in a maximum speed limitations at which each synchronous system can run.
Asynchronous circuit is a sequential digital logic circuit that does not use a global clock circuit or signal generator to synchronize its components. Instead, the components are driven by a handshaking circuit which indicates a completion of a set of instructions. Handshaking works by simple data transfer protocols. Many synchronous circuits were developed in early 1950s as part of bigger asynchronous systems. Asynchronous circuits and theory surrounding is a part of several steps in integrated circuit design, a field of digital electronics engineering.

In electronics, metastability is the ability of a digital electronic system to persist for an unbounded time in an unstable equilibrium or metastable state. In digital logic circuits, a digital signal is required to be within certain voltage or current limits to represent a '0' or '1' logic level for correct circuit operation; if the signal is within a forbidden intermediate range it may cause faulty behavior in logic gates the signal is applied to. In metastable states, the circuit may be unable to settle into a stable '0' or '1' logic level within the time required for proper circuit operation. As a result, the circuit can act in unpredictable ways, and may lead to a system failure, sometimes referred to as a "glitch". Metastability is an instance of the Buridan's ass paradox.
In computer architecture, clock gating is a popular power management technique used in many synchronous circuits for reducing dynamic power dissipation, by removing the clock signal when the circuit, or a subpart of it, is not in use or ignores clock signal. Clock gating saves power by pruning the clock tree, at the cost of adding more logic to a circuit. Pruning the clock disables portions of the circuitry so that the flip-flops in them do not switch state, as switching the state consumes power. When not being switched, the switching power consumption goes to zero, and only leakage currents are incurred.
In digital electronic design a clock domain crossing (CDC), or simply clock crossing, is the traversal of a signal in a synchronous digital circuit from one clock domain into another. If a signal does not assert long enough and is not registered, it may appear asynchronous on the incoming clock boundary.

The VAX 8000 is a discontinued family of superminicomputers developed and manufactured by Digital Equipment Corporation (DEC) using processors implementing the VAX instruction set architecture (ISA).

Random-access memory is a form of electronic computer memory that can be read and changed in any order, typically used to store working data and machine code. A random-access memory device allows data items to be read or written in almost the same amount of time irrespective of the physical location of data inside the memory, in contrast with other direct-access data storage media, where the time required to read and write data items varies significantly depending on their physical locations on the recording medium, due to mechanical limitations such as media rotation speeds and arm movement.

In electronics, flip-flops and latches are circuits that have two stable states that can store state information – a bistable multivibrator. The circuit can be made to change state by signals applied to one or more control inputs and will output its state. It is the basic storage element in sequential logic. Flip-flops and latches are fundamental building blocks of digital electronics systems used in computers, communications, and many other types of systems.
References
- ↑ Noergaard 2012, p. 297.
- ↑ Gottlieb 1999.
- ↑ Michael Fingeroff. "High-Level Synthesis Blue Book". 2010. p. 270. quote: "The bus or memory arbiter processes the request from the different processes and decides who gets access to the bus/memory."
- ↑ Arten Esa, Bryan Myers. "Design of an Arbiter for DDR3 Memory". 2013.
- ↑ Kearney, D.A.; Veldman, G. "A concurrent multi-bank memory arbiter for dynamic IP cores using idle skip round robin". 2003. DOI: 10.1109/FPT.2003.1275789.
- ↑ docs.oracle.com https://docs.oracle.com/cd/E19620-01/805-4447/auto2/index.html . Retrieved 2024-07-26.
{{cite web}}: Missing or empty|title=(help) - ↑ Tim Downey. "Bus Arbitration"
- ↑ Shun Yan Cheung. "Bus Arbitration" Archived 2022-05-28 at the Wayback Machine