Related Research Articles

In mathematics, a hypergraph is a generalization of a graph in which an edge can join any number of vertices. In contrast, in an ordinary graph, an edge connects exactly two vertices.

In the mathematical field of graph theory, a bipartite graph is a graph whose vertices can be divided into two disjoint and independent sets and , that is, every edge connects a vertex in to one in . Vertex sets and are usually called the parts of the graph. Equivalently, a bipartite graph is a graph that does not contain any odd-length cycles.
This is a glossary of graph theory. Graph theory is the study of graphs, systems of nodes or vertices connected in pairs by lines or edges.
In mathematics, an incidence matrix is a logical matrix that shows the relationship between two classes of objects, usually called an incidence relation. If the first class is X and the second is Y, the matrix has one row for each element of X and one column for each element of Y. The entry in row x and column y is 1 if x and y are related and 0 if they are not. There are variations; see below.
In the mathematical field of graph theory, a graph homomorphism is a mapping between two graphs that respects their structure. More concretely, it is a function between the vertex sets of two graphs that maps adjacent vertices to adjacent vertices.

In graph theory, the Erdős–Faber–Lovász conjecture is a problem about graph coloring, named after Paul Erdős, Vance Faber, and László Lovász, who formulated it in 1972. It says:

In the mathematical discipline of graph theory, the dual graph of a planar graph G is a graph that has a vertex for each face of G. The dual graph has an edge for each pair of faces in G that are separated from each other by an edge, and a self-loop when the same face appears on both sides of an edge. Thus, each edge e of G has a corresponding dual edge, whose endpoints are the dual vertices corresponding to the faces on either side of e. The definition of the dual depends on the choice of embedding of the graph G, so it is a property of plane graphs rather than planar graphs. For planar graphs generally, there may be multiple dual graphs, depending on the choice of planar embedding of the graph.
The dual problem is a reformulation of a constraint satisfaction problem expressing each constraint of the original problem as a variable. Dual problems only contain binary constraints, and are therefore solvable by algorithms tailored for such problems. The join graphs and join trees of a constraint satisfaction problem are graphs representing its dual problem or a problem obtained from the dual problem removing some redundant constraints.
The complexity of constraint satisfaction is the application of computational complexity theory to constraint satisfaction. It has mainly been studied for discriminating between tractable and intractable classes of constraint satisfaction problems on finite domains.
In constraint satisfaction, a decomposition method translates a constraint satisfaction problem into another constraint satisfaction problem that is binary and acyclic. Decomposition methods work by grouping variables into sets, and solving a subproblem for each set. These translations are done because solving binary acyclic problems is a tractable problem.
In computer science, a holographic algorithm is an algorithm that uses a holographic reduction. A holographic reduction is a constant-time reduction that maps solution fragments many-to-many such that the sum of the solution fragments remains unchanged. These concepts were introduced by Leslie Valiant, who called them holographic because "their effect can be viewed as that of producing interference patterns among the solution fragments". The algorithms are unrelated to laser holography, except metaphorically. Their power comes from the mutual cancellation of many contributions to a sum, analogous to the interference patterns in a hologram.
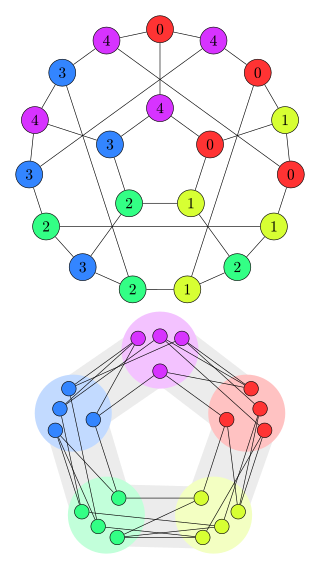
In graph theory, particularly in the theory of hypergraphs, the line graph of a hypergraphH, denoted L(H), is the graph whose vertex set is the set of the hyperedges of H, with two vertices adjacent in L(H) when their corresponding hyperedges have a nonempty intersection in H. In other words, L(H) is the intersection graph of a family of finite sets. It is a generalization of the line graph of a graph.
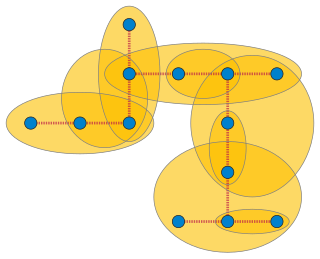
In the mathematical field of graph theory, a hypergraph H is called a hypertree if it admits a host graph T such that T is a tree. In other words, H is a hypertree if there exists a tree T such that every hyperedge of H is the set of vertices of a connected subtree of T. Hypertrees have also been called arboreal hypergraphs or tree hypergraphs.

Clique complexes, independence complexes, flag complexes, Whitney complexes and conformal hypergraphs are closely related mathematical objects in graph theory and geometric topology that each describe the cliques of an undirected graph.

In the mathematical discipline of graph theory, a 3-dimensional matching is a generalization of bipartite matching to 3-partite hypergraphs, which consist of hyperedges each of which contains 3 vertices.

In graph theory, a locally linear graph is an undirected graph in which every edge belongs to exactly one triangle. Equivalently, for each vertex of the graph, its neighbors are each adjacent to exactly one other neighbor, so the neighbors can be paired up into an induced matching. Locally linear graphs have also been called locally matched graphs. Their triangles form the hyperedges of triangle-free 3-uniform linear hypergraphs and the blocks of certain partial Steiner triple systems, and the locally linear graphs are exactly the Gaifman graphs of these hypergraphs or partial Steiner systems.
In graph theory, a matching in a hypergraph is a set of hyperedges, in which every two hyperedges are disjoint. It is an extension of the notion of matching in a graph.
In graph theory, a vertex cover in a hypergraph is a set of vertices, such that every hyperedge of the hypergraph contains at least one vertex of that set. It is an extension of the notion of vertex cover in a graph.
In the mathematical field of graph theory, Hall-type theorems for hypergraphs are several generalizations of Hall's marriage theorem from graphs to hypergraphs. Such theorems were proved by Ofra Kessler, Ron Aharoni, Penny Haxell, Roy Meshulam, and others.
In graph theory, a balanced hypergraph is a hypergraph that has several properties analogous to that of a bipartite graph.
References
- 1 2 3 Handbook of Constraint Programming, by Francesca Rossi, Peter Van Beek, Toby Walsh (2006) ISBN 0-444-52726-5, p. 211, 212