The Dynamic Host Configuration Protocol (DHCP) is a network management protocol used on Internet Protocol (IP) networks, whereby a DHCP server dynamically assigns an IP address and other network configuration parameters to each device on the network, so they can communicate with other IP networks. A DHCP server enables computers to request IP addresses and networking parameters automatically from the Internet service provider (ISP), reducing the need for a network administrator or a user to manually assign IP addresses to all network devices. In the absence of a DHCP server, a computer or other device on the network needs to be manually assigned an IP address, or to assign itself an APIPA address, the latter of which will not enable it to communicate outside its local subnet.
A real-time operating system (RTOS) is an operating system (OS) intended to serve real-time applications that process data as it comes in, typically without buffer delays. Processing time requirements are measured in tenths of seconds or shorter increments of time. A real-time system is a time-bound system which has well-defined, fixed time constraints. Processing must be done within the defined constraints or the system will fail. They either are event-driven or time-sharing. Event-driven systems switch between tasks based on their priorities, while time-sharing systems switch the task based on clock interrupts. Most RTOSs use a pre-emptive scheduling algorithm.
The Simple Mail Transfer Protocol (SMTP) is a communication protocol for electronic mail transmission. As an Internet standard, SMTP was first defined in 1982 by RFC 821, and updated in 2008 by RFC 5321 to Extended SMTP additions, which is the protocol variety in widespread use today. Mail servers and other message transfer agents use SMTP to send and receive mail messages. SMTP servers commonly use the Transmission Control Protocol on port number 25.
Simple Network Management Protocol (SNMP) is an Internet Standard protocol for collecting and organizing information about managed devices on IP networks and for modifying that information to change device behaviour. Devices that typically support SNMP include cable modems, routers, switches, servers, workstations, printers, and more.
The Address Resolution Protocol (ARP) is a communication protocol used for discovering the link layer address, such as a MAC address, associated with a given internet layer address, typically an IPv4 address. This mapping is a critical function in the Internet protocol suite. ARP was defined in 1982 by RFC 826, which is Internet Standard STD 37.
Link-state routing protocols are one of the two main classes of routing protocols used in packet switching networks for computer communications, the other being distance-vector routing protocols. Examples of link-state routing protocols include Open Shortest Path First (OSPF) and Intermediate System to Intermediate System (IS-IS).
SIMPLE, the Session Initiation Protocol for Instant Messaging and Presence Leveraging Extensions, is an instant messaging (IM) and presence protocol suite based on Session Initiation Protocol (SIP) managed by the Internet Engineering Task Force. Contrary to the vast majority of IM and presence protocols used by software deployed today, SIMPLE is an open standard like XMPP.
Secure multi-party computation is a subfield of cryptography with the goal of creating methods for parties to jointly compute a function over their inputs while keeping those inputs private. Unlike traditional cryptographic tasks, where cryptography assures security and integrity of communication or storage and the adversary is outside the system of participants, the cryptography in this model protects participants' privacy from each other.
In computer networking, a reliable protocol is a communication protocol that notifies the sender whether or not the delivery of data to intended recipients was successful. Reliability is a synonym for assurance, which is the term used by the ITU and ATM Forum.
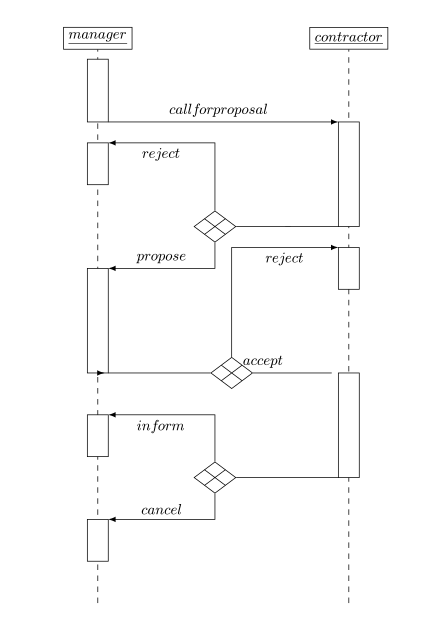
Agent Communication Language (ACL), proposed by the Foundation for Intelligent Physical Agents (FIPA), is a proposed standard language for agent communications. Knowledge Query and Manipulation Language (KQML) is another proposed standard.
The processes of government procurement in the United States enable federal, state and local government bodies in the United States to acquire goods, services, and interests in real property.
Paxos is a family of protocols for solving consensus in a network of unreliable or fallible processors. Consensus is the process of agreeing on one result among a group of participants. This problem becomes difficult when the participants or their communications may experience failures.
The core idea of Artificial Intelligence systems integration is making individual software components, such as speech synthesizers, interoperable with other components, such as common sense knowledgebases, in order to create larger, broader and more capable A.I. systems. The main methods that have been proposed for integration are message routing, or communication protocols that the software components use to communicate with each other, often through a middleware blackboard system.
Java Agent Development Framework, or JADE, is a software framework for the development of intelligent agents, implemented in Java. JADE system supports coordination between several agents FIPA and provides a standard implementation of the communication language FIPA-ACL, which facilitates the communication between agents and allows the services detection of the system. JADE was originally developed by Telecom Italia and is distributed as free software.

The Better Approach To Mobile Adhoc Networking (B.A.T.M.A.N.) is a routing protocol for multi-hop mobile ad hoc networks which is under development by the German "Freifunk" community and intended to replace the Optimized Link State Routing Protocol (OLSR).
In distributed computing, leader election is the process of designating a single process as the organizer of some task distributed among several computers (nodes). Before the task is begun, all network nodes are either unaware which node will serve as the "leader" of the task, or unable to communicate with the current coordinator. After a leader election algorithm has been run, however, each node throughout the network recognizes a particular, unique node as the task leader.
Agent-oriented programming (AOP) is a programming paradigm where the construction of the software is centered on the concept of software agents. In contrast to object-oriented programming which has objects at its core, AOP has externally specified agents at its core. They can be thought of as abstractions of objects. Exchanged messages are interpreted by receiving "agents", in a way specific to its class of agents.
Gbcast is a reliable multicast protocol that provides ordered, fault-tolerant (all-or-none) message delivery in a group of receivers within a network of machines that experience crash failure. The protocol is capable of solving Consensus in a network of unreliable processors, and can be used to implement state machine replication. Gbcast can be used in a standalone manner, or can support the virtual synchrony execution model, in which case Gbcast is normally used for group membership management while other, faster, protocols are often favored for routine communication tasks.
MaSMT is a free, lightweight Multi-agent system development framework, design through the Java environment. The MaSMT3 framework provides three types of agents, namely ordinary agent and managing agent and root agent. The managing agent capable to handle set of ordinary agent and the root agent capable to handle set of manager agents. MaSMT3.0 includes few features than the previous versions. MaSMT 3.0 includes root agent to handle swam of agents, Environment handling features to dynamically store agent's ontology, and notice board has been introducing to see required messages and events. In addition to these main features, agent status monitor has been introducing to view transporting messages. Multi-agent technology is modern software palindrome that capable of handling the complexity of a software system and providing intelligent solutions through the power of agent communication. A framework is a useful tool to develop multi-agent system and it saves lot of programmer's time and provides standards for the agent development.