In differential geometry, a subject of mathematics, a symplectic manifold is a smooth manifold, , equipped with a closed nondegenerate differential 2-form , called the symplectic form. The study of symplectic manifolds is called symplectic geometry or symplectic topology. Symplectic manifolds arise naturally in abstract formulations of classical mechanics and analytical mechanics as the cotangent bundles of manifolds. For example, in the Hamiltonian formulation of classical mechanics, which provides one of the major motivations for the field, the set of all possible configurations of a system is modeled as a manifold, and this manifold's cotangent bundle describes the phase space of the system.
In mathematics, the tangent space of a manifold generalizes to higher dimensions the notion of tangent planes to surfaces in three dimensions and tangent lines to curves in two dimensions. In the context of physics the tangent space to a manifold at a point can be viewed as the space of possible velocities for a particle moving on the manifold.

In differential geometry, the tangent bundle of a differentiable manifold is a manifold which assembles all the tangent vectors in . As a set, it is given by the disjoint union of the tangent spaces of . That is,
In mathematics, differential forms provide a unified approach to define integrands over curves, surfaces, solids, and higher-dimensional manifolds. The modern notion of differential forms was pioneered by Élie Cartan. It has many applications, especially in geometry, topology and physics.
In differential geometry, the Lie derivative, named after Sophus Lie by Władysław Ślebodziński, evaluates the change of a tensor field, along the flow defined by another vector field. This change is coordinate invariant and therefore the Lie derivative is defined on any differentiable manifold.
In the mathematical field of differential geometry, a Cartan connection is a flexible generalization of the notion of an affine connection. It may also be regarded as a specialization of the general concept of a principal connection, in which the geometry of the principal bundle is tied to the geometry of the base manifold using a solder form. Cartan connections describe the geometry of manifolds modelled on homogeneous spaces.
In mathematics, and especially differential geometry and gauge theory, a connection is a device that defines a notion of parallel transport on the bundle; that is, a way to "connect" or identify fibers over nearby points. A principal G-connection on a principal G-bundle P over a smooth manifold M is a particular type of connection which is compatible with the action of the group G.
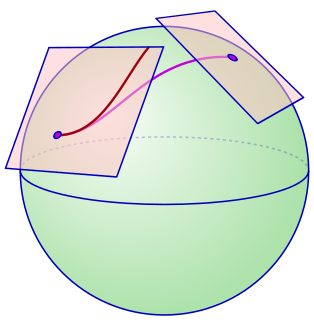
In differential geometry, an affine connection is a geometric object on a smooth manifold which connects nearby tangent spaces, so it permits tangent vector fields to be differentiated as if they were functions on the manifold with values in a fixed vector space. Connections are among the simplest methods of defining differentiation of the sections of vector bundles.
In mathematics, deformation theory is the study of infinitesimal conditions associated with varying a solution P of a problem to slightly different solutions Pε, where ε is a small number, or a vector of small quantities. The infinitesimal conditions are the result of applying the approach of differential calculus to solving a problem with constraints. The name is an analogy to non-rigid structures that deform slightly to accommodate external forces.
In the mathematical field of differential geometry, the exterior covariant derivative is an extension of the notion of exterior derivative to the setting of a differentiable principal bundle or vector bundle with a connection.
In differential geometry, a Poisson structure on a smooth manifold is a Lie bracket on the algebra of smooth functions on , subject to the Leibniz rule
In physics and mathematics, supermanifolds are generalizations of the manifold concept based on ideas coming from supersymmetry. Several definitions are in use, some of which are described below.
In mathematics, the Maurer–Cartan form for a Lie group G is a distinguished differential one-form on G that carries the basic infinitesimal information about the structure of G. It was much used by Élie Cartan as a basic ingredient of his method of moving frames, and bears his name together with that of Ludwig Maurer.
In mathematics, the Chern–Weil homomorphism is a basic construction in Chern–Weil theory that computes topological invariants of vector bundles and principal bundles on a smooth manifold M in terms of connections and curvature representing classes in the de Rham cohomology rings of M. That is, the theory forms a bridge between the areas of algebraic topology and differential geometry. It was developed in the late 1940s by Shiing-Shen Chern and André Weil, in the wake of proofs of the generalized Gauss–Bonnet theorem. This theory was an important step in the theory of characteristic classes.
In mathematics, a Killing vector field, named after Wilhelm Killing, is a vector field on a Riemannian manifold that preserves the metric. Killing fields are the infinitesimal generators of isometries; that is, flows generated by Killing fields are continuous isometries of the manifold. More simply, the flow generates a symmetry, in the sense that moving each point of an object the same distance in the direction of the Killing vector will not distort distances on the object.
In mathematics, a volume form or top-dimensional form is a differential form of degree equal to the differentiable manifold dimension. Thus on a manifold of dimension , a volume form is an -form. It is an element of the space of sections of the line bundle , denoted as . A manifold admits a nowhere-vanishing volume form if and only if it is orientable. An orientable manifold has infinitely many volume forms, since multiplying a volume form by a function yields another volume form. On non-orientable manifolds, one may instead define the weaker notion of a density.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a vector space to allow one to apply calculus. Any manifold can be described by a collection of charts (atlas). One may then apply ideas from calculus while working within the individual charts, since each chart lies within a vector space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In mathematics, the derivative is a fundamental construction of differential calculus and admits many possible generalizations within the fields of mathematical analysis, combinatorics, algebra, geometry, etc.
In differential geometry, an Ehresmann connection is a version of the notion of a connection, which makes sense on any smooth fiber bundle. In particular, it does not rely on the possible vector bundle structure of the underlying fiber bundle, but nevertheless, linear connections may be viewed as a special case. Another important special case of Ehresmann connections are principal connections on principal bundles, which are required to be equivariant in the principal Lie group action.
In the mathematical field of differential topology, the Lie bracket of vector fields, also known as the Jacobi–Lie bracket or the commutator of vector fields, is an operator that assigns to any two vector fields X and Y on a smooth manifold M a third vector field denoted [X, Y].






































