Equidimensional is an adjective applied to objects that have nearly the same size or spread in multiple directions. As a mathematical concept, it may be applied to objects that extend across any number of dimensions, such as equidimensional schemes. More specifically, it's also used to characterize the shape of three-dimensional solids.
Zingg shape classification map for any solid object's convex envelope, in terms of long (a), intermediate (b) and short (c) envelope axes.
The word equidimensional is sometimes used by geologists to describe the shape of three-dimensional objects. In that case it is a synonym for equant.[1] Deviations from equidimensional are used to classify the shape of convex objects like rocks or particles.[2] For instance, if a, b and c are the long, intermediate, and short axes of a convex structure, and R is a number greater than one, then four mutually exclusive shape classes may be defined by:[3]
Table 1: Zingg's convex object shape classes
shape category
long & intermediate axes
intermediate & short axes
explanation
example
equant
b < a < R b
c < b < R c
all dimensions are comparable
ball
prolate
a > R b
c < b < R c
one dimension is much longer
cigar
oblate
b < a < R b
b > R c
one dimension is much shorter
pancake
bladed
a > R b
b > R c
all dimensions are very different
belt
For Zingg's applications, R was set equal to 3⁄2. Perhaps this is an intuitively reasonable setting in general for the point at which something's dimensions become significantly unequal.
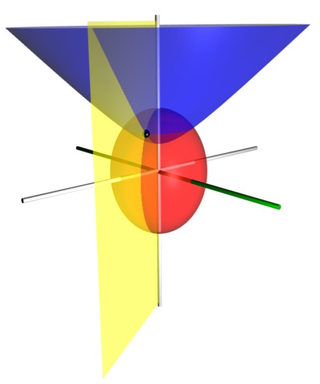
The relationship between the four categories is illustrated in the figure at right, which allows one to plot long and short axis dimensions for the convex envelope of any solid object. Perfectly equidimensional spheres plot in the lower right corner. Objects with equal short and intermediate axes lie on the upper bound, while objects with equal long and intermediate axes plot on the lower bound. The dotted gray and black lines correspond to integer a⁄c values ranging from 2 up to 10.
The point of intersection for all four classes on this plot occurs when the object's axes a:b:c have ratios of R2:R:1, or 9:6:4 when R=3⁄2. Make axis b any shorter and the object becomes prolate. Make axis b any longer and it becomes oblate. Bring a and c closer to b and the object becomes equidimensional. Separate a and c further from b and it becomes bladed.
For example, the convex envelope for some humans might plot near the black dot in the upper left of the figure.
↑ American Geological Institute Dictionary of Geological Terms (1976, Anchor Books, New York) p.147
↑ C. F. Royse (1970) An introduction to sediment analysis (Arizona State University Press, Tempe) 169pp.
↑ Th. Zingg (1935). "Beitrag zur Schotteranalyse". Schweizerische Mineralogische und Petrographische Mitteilungen15, 39–140.
Related Research Articles
In geography, latitude is a coordinate that specifies the north–south position of a point on the surface of the Earth or another celestial body. Latitude is given as an angle that ranges from –90° at the south pole to 90° at the north pole, with 0° at the Equator. Lines of constant latitude, or parallels, run east–west as circles parallel to the equator. Latitude and longitude are used together as a coordinate pair to specify a location on the surface of the Earth.
A sphere is a geometrical object that is a three-dimensional analogue to a two-dimensional circle. A sphere is the set of points that are all at the same distance r from a given point in three-dimensional space. That given point is the centre of the sphere, and r is the sphere's radius. The earliest known mentions of spheres appear in the work of the ancient Greek mathematicians.
A spheroid, also known as an ellipsoid of revolution or rotational ellipsoid, is a quadric surface obtained by rotating an ellipse about one of its principal axes; in other words, an ellipsoid with two equal semi-diameters. A spheroid has circular symmetry.
An ellipsoid is a surface that may be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation.
Figure of the Earth is a term of art in geodesy that refers to the size and shape used to model Earth. The size and shape it refers to depend on context, including the precision needed for the model. A sphere is a well-known historical approximation of the figure of the Earth that is satisfactory for many purposes. Several models with greater accuracy have been developed so that coordinate systems can serve the precise needs of navigation, surveying, cadastre, land use, and various other concerns.
In computer graphics and computational geometry, a bounding volume for a set of objects is a closed volume that completely contains the union of the objects in the set. Bounding volumes are used to improve the efficiency of geometrical operations by using simple volumes to contain more complex objects. Normally, simpler volumes have simpler ways to test for overlap.
A cone is a three-dimensional geometric shape that tapers smoothly from a flat base to a point called the apex or vertex.
In physics and astronomy, Euler's three-body problem is to solve for the motion of a particle that is acted upon by the gravitational field of two other point masses that are fixed in space. This problem is exactly solvable, and yields an approximate solution for particles moving in the gravitational fields of prolate and oblate spheroids. This problem is named after Leonhard Euler, who discussed it in memoirs published in 1760. Important extensions and analyses were contributed subsequently by Lagrange, Liouville, Laplace, Jacobi, Darboux, Le Verrier, Velde, Hamilton, Poincaré, Birkhoff and E. T. Whittaker, among others.
An oval is a closed curve in a plane which resembles the outline of an egg. The term is not very specific, but in some areas it is given a more precise definition, which may include either one or two axes of symmetry of an ellipse. In common English, the term is used in a broader sense: any shape which reminds one of an egg. The three-dimensional version of an oval is called an ovoid.
In crystal optics, the index ellipsoid is a geometric construction which concisely represents the refractive indices and associated polarizations of light, as functions of the orientation of the wavefront, in a doubly-refractive crystal. When this ellipsoid is cut through its center by a plane parallel to the wavefront, the resulting intersection is an ellipse whose major and minor semiaxes have lengths equal to the two refractive indices for that orientation of the wavefront, and have the directions of the respective polarizations as expressed by the electric displacement vector D. The principal semiaxes of the index ellipsoid are called the principal refractive indices.
Prolate spheroidal coordinates are a three-dimensional orthogonal coordinate system that results from rotating the two-dimensional elliptic coordinate system about the focal axis of the ellipse, i.e., the symmetry axis on which the foci are located. Rotation about the other axis produces oblate spheroidal coordinates. Prolate spheroidal coordinates can also be considered as a limiting case of ellipsoidal coordinates in which the two smallest principal axes are equal in length.
In hydrodynamics, the Perrin friction factors are multiplicative adjustments to the translational and rotational friction of a rigid spheroid, relative to the corresponding frictions in spheres of the same volume. These friction factors were first calculated by Jean-Baptiste Perrin.
In classical mechanics, Poinsot's construction is a geometrical method for visualizing the torque-free motion of a rotating rigid body, that is, the motion of a rigid body on which no external forces are acting. This motion has four constants: the kinetic energy of the body and the three components of the angular momentum, expressed with respect to an inertial laboratory frame. The angular velocity vector of the rigid rotor is not constant, but satisfies Euler's equations. Without explicitly solving these equations, Louis Poinsot was able to visualize the motion of the endpoint of the angular velocity vector. To this end he used the conservation of kinetic energy and angular momentum as constraints on the motion of the angular velocity vector . If the rigid rotor is symmetric, the vector describes a cone. This is the torque-free precession of the rotation axis of the rotor.
Gans theory or Mie-Gans theory is the extension of Mie theory for the case of spheroidal particles. It gives the scattering characteristics of both oblate and prolate spheroidal particles much smaller than the excitation wavelength. Since it is a solution of the Maxwell equations it should technically not be called a theory.
The prolate spheroidal wave functions are eigenfunctions of the Laplacian in prolate spheroidal coordinates, adapted to boundary conditions on certain ellipsoids of revolution. Related are the oblate spheroidal wave functions.
In mathematics, the Euclidean plane is a Euclidean space of dimension two. That is, a geometric setting in which two real quantities are required to determine the position of each point, which includes affine notions of parallel lines, and also metrical notions of distance, circles, and angle measurement.
An Earth ellipsoid or Earth spheroid is a mathematical figure approximating the Earth's form, used as a reference frame for computations in geodesy, astronomy, and the geosciences. Various different ellipsoids have been used as approximations.
The firehose instability is a dynamical instability of thin or elongated galaxies. The instability causes the galaxy to buckle or bend in a direction perpendicular to its long axis. After the instability has run its course, the galaxy is less elongated than before. Any sufficiently thin stellar system, in which some component of the internal velocity is in the form of random or counter-streaming motions, is subject to the instability.
The study of geodesics on an ellipsoid arose in connection with geodesy specifically with the solution of triangulation networks. The figure of the Earth is well approximated by an oblate ellipsoid, a slightly flattened sphere. A geodesic is the shortest path between two points on a curved surface, analogous to a straight line on a plane surface. The solution of a triangulation network on an ellipsoid is therefore a set of exercises in spheroidal trigonometry.
In geometry, a fat object is an object in two or more dimensions, whose lengths in the different dimensions are similar. For example, a square is fat because its length and width are identical. A 2-by-1 rectangle is thinner than a square, but it is fat relative to a 10-by-1 rectangle. Similarly, a circle is fatter than a 1-by-10 ellipse and an equilateral triangle is fatter than a very obtuse triangle.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.