
In physics, the Coriolis force is an inertial force that acts on objects in motion within a frame of reference that rotates with respect to an inertial frame. In a reference frame with clockwise rotation, the force acts to the left of the motion of the object. In one with anticlockwise rotation, the force acts to the right. Deflection of an object due to the Coriolis force is called the Coriolis effect. Though recognized previously by others, the mathematical expression for the Coriolis force appeared in an 1835 paper by French scientist Gaspard-Gustave de Coriolis, in connection with the theory of water wheels. Early in the 20th century, the term Coriolis force began to be used in connection with meteorology.
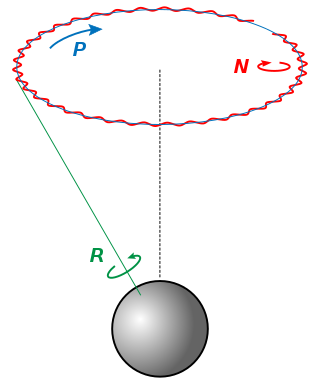
Nutation is a rocking, swaying, or nodding motion in the axis of rotation of a largely axially symmetric object, such as a gyroscope, planet, or bullet in flight, or as an intended behaviour of a mechanism. In an appropriate reference frame it can be defined as a change in the second Euler angle. If it is not caused by forces external to the body, it is called free nutation or Euler nutation. A pure nutation is a movement of a rotational axis such that the first Euler angle is constant. Therefore it can be seen that the circular red arrow in the diagram indicates the combined effects of precession and nutation, while nutation in the absence of precession would only change the tilt from vertical. However, in spacecraft dynamics, precession is sometimes referred to as nutation.

A wing is a type of fin that produces lift while moving through air or some other fluid. Accordingly, wings have streamlined cross-sections that are subject to aerodynamic forces and act as airfoils. A wing's aerodynamic efficiency is expressed as its lift-to-drag ratio. The lift a wing generates at a given speed and angle of attack can be one to two orders of magnitude greater than the total drag on the wing. A high lift-to-drag ratio requires a significantly smaller thrust to propel the wings through the air at sufficient lift.

Halteres are a pair of small club-shaped organs on the body of two orders of flying insects that provide information about body rotations during flight. Insects of the large order Diptera (flies) have halteres which evolved from a pair of ancestral hindwings, while males of the much smaller order Strepsiptera (stylops) have halteres which evolved from a pair of ancestral forewings.

A tailplane, also known as a horizontal stabiliser, is a small lifting surface located on the tail (empennage) behind the main lifting surfaces of a fixed-wing aircraft as well as other non-fixed-wing aircraft such as helicopters and gyroplanes. Not all fixed-wing aircraft have tailplanes. Canards, tailless and flying wing aircraft have no separate tailplane, while in V-tail aircraft the vertical stabiliser, rudder, and the tail-plane and elevator are combined to form two diagonal surfaces in a V layout.

Flight dynamics is the science of air vehicle orientation and control in three dimensions. The three critical flight dynamics parameters are the angles of rotation in three dimensions about the vehicle's center of gravity (cg), known as pitch, roll and yaw. These are collectively known as aircraft attitude, often principally relative to the atmospheric frame in normal flight, but also relative to terrain during takeoff or landing, or when operating at low elevation. The concept of attitude is not specific to fixed-wing aircraft, but also extends to rotary aircraft such as helicopters, and dirigibles, where the flight dynamics involved in establishing and controlling attitude are entirely different.

An ornithopter is an aircraft that flies by flapping its wings. Designers sought to imitate the flapping-wing flight of birds, bats, and insects. Though machines may differ in form, they are usually built on the same scale as flying animals. Larger, crewed ornithopters have also been built and some have been successful. Crewed ornithopters are generally either powered by engines or by the pilot.

In aerodynamics, wing loading is the total mass of an aircraft or flying animal divided by the area of its wing. The stalling speed of an aircraft is partly determined by its wing loading.

Aircraft flight control surfaces are aerodynamic devices allowing a pilot to adjust and control the aircraft's flight attitude.

Bird flight is the primary mode of locomotion used by most bird species in which birds take off and fly. Flight assists birds with feeding, breeding, avoiding predators, and migrating.

Insects are the only group of invertebrates that have evolved wings and flight. Insects first flew in the Carboniferous, some 300 to 350 million years ago, making them the first animals to evolve flight. Wings may have evolved from appendages on the sides of existing limbs, which already had nerves, joints, and muscles used for other purposes. These may initially have been used for sailing on water, or to slow the rate of descent when gliding.

On a helicopter, the main rotor or rotor system is the combination of several rotary wings with a control system, that generates the aerodynamic lift force that supports the weight of the helicopter, and the thrust that counteracts aerodynamic drag in forward flight. Each main rotor is mounted on a vertical mast over the top of the helicopter, as opposed to a helicopter tail rotor, which connects through a combination of drive shaft(s) and gearboxes along the tail boom. The blade pitch is typically controlled by the pilot using the helicopter flight controls. Helicopters are one example of rotary-wing aircraft (rotorcraft). The name is derived from the Greek words helix, helik-, meaning spiral; and pteron meaning wing.

A number of animals are capable of aerial locomotion, either by powered flight or by gliding. This trait has appeared by evolution many times, without any single common ancestor. Flight has evolved at least four times in separate animals: insects, pterosaurs, birds, and bats. Gliding has evolved on many more occasions. Usually the development is to aid canopy animals in getting from tree to tree, although there are other possibilities. Gliding, in particular, has evolved among rainforest animals, especially in the rainforests in Asia where the trees are tall and widely spaced. Several species of aquatic animals, and a few amphibians and reptiles have also evolved this gliding flight ability, typically as a means of evading predators.

Bicycle and motorcycle dynamics is the science of the motion of bicycles and motorcycles and their components, due to the forces acting on them. Dynamics falls under a branch of physics known as classical mechanics. Bike motions of interest include balancing, steering, braking, accelerating, suspension activation, and vibration. The study of these motions began in the late 19th century and continues today.

Around 350 BCE, Aristotle and other philosophers of the time attempted to explain the aerodynamics of avian flight. Even after the discovery of the ancestral bird Archaeopteryx which lived over 150 million years ago, debates still persist regarding the evolution of flight. There are three leading hypotheses pertaining to avian flight: Pouncing Proavis model, Cursorial model, and Arboreal model.

A yaw rotation is a movement around the yaw axis of a rigid body that changes the direction it is pointing, to the left or right of its direction of motion. The yaw rate or yaw velocity of a car, aircraft, projectile or other rigid body is the angular velocity of this rotation, or rate of change of the heading angle when the aircraft is horizontal. It is commonly measured in degrees per second or radians per second.

Certain species of fish and birds are able to locomote in both air and water, two fluid media with very different properties. A fluid is a particular phase of matter that deforms under shear stresses and includes any type of liquid or gas. Because fluids are easily deformable and move in response to applied forces, efficiently locomoting in a fluid medium presents unique challenges. Specific morphological characteristics are therefore required in animal species that primarily depend on fluidic locomotion. Because the properties of air and water are so different, swimming and flying have very disparate morphological requirements. As a result, despite the large diversity of animals that are capable of flight or swimming, only a limited number of these species have mastered the ability to both fly and swim. These species demonstrate distinct morphological and behavioral tradeoffs associated with transitioning from air to water and water to air.

The DelFly is a fully controllable camera-equipped flapping wing Micro Air Vehicle or Ornithopter developed at the Micro Air Vehicle Lab of the Delft University of TechnologyArchived 2019-10-19 at the Wayback Machine in collaboration with Wageningen University.
Asynchronous muscles are muscles in which there is no one-to-one relationship between electrical stimulation and mechanical contraction. These muscles are found in 75% of flying insects and have convergently evolved 7-10 times. Unlike their synchronous counterparts that contract once per neural signal, mechanical oscillations trigger force production in asynchronous muscles. Typically, the rate of mechanical contraction is an order of magnitude greater than electrical signals. Although they achieve greater force output and higher efficiency at high frequencies, they have limited applications because of their dependence on mechanical stretch.

Bird wings are a paired forelimb in birds. The wings give the birds the ability to fly, creating lift.

