Related Research Articles

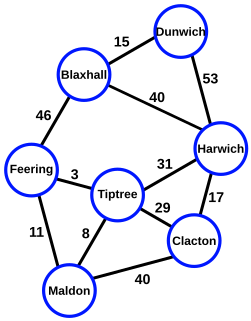
In graph theory, the shortest path problem is the problem of finding a path between two vertices in a graph such that the sum of the weights of its constituent edges is minimized.

Dijkstra's algorithm is an algorithm for finding the shortest paths between nodes in a graph, which may represent, for example, road networks. It was conceived by computer scientist Edsger W. Dijkstra in 1956 and published three years later.

In computer science, Prim's algorithm is a greedy algorithm that finds a minimum spanning tree for a weighted undirected graph. This means it finds a subset of the edges that forms a tree that includes every vertex, where the total weight of all the edges in the tree is minimized. The algorithm operates by building this tree one vertex at a time, from an arbitrary starting vertex, at each step adding the cheapest possible connection from the tree to another vertex.
A* is a graph traversal and path search algorithm, which is often used in many fields of computer science due to its completeness, optimality, and optimal efficiency. One major practical drawback is its space complexity, as it stores all generated nodes in memory. Thus, in practical travel-routing systems, it is generally outperformed by algorithms which can pre-process the graph to attain better performance, as well as memory-bounded approaches; however, A* is still the best solution in many cases.

Dynamic programming is both a mathematical optimization method and a computer programming method. The method was developed by Richard Bellman in the 1950s and has found applications in numerous fields, from aerospace engineering to economics.

The Bellman–Ford algorithm is an algorithm that computes shortest paths from a single source vertex to all of the other vertices in a weighted digraph. It is slower than Dijkstra's algorithm for the same problem, but more versatile, as it is capable of handling graphs in which some of the edge weights are negative numbers. The algorithm was first proposed by Alfonso Shimbel (1955), but is instead named after Richard Bellman and Lester Ford Jr., who published it in 1958 and 1956, respectively. Edward F. Moore also published a variation of the algorithm in 1959, and for this reason it is also sometimes called the Bellman–Ford–Moore algorithm.
In computer science, the Floyd–Warshall algorithm is an algorithm for finding shortest paths in a directed weighted graph with positive or negative edge weights. A single execution of the algorithm will find the lengths of shortest paths between all pairs of vertices. Although it does not return details of the paths themselves, it is possible to reconstruct the paths with simple modifications to the algorithm. Versions of the algorithm can also be used for finding the transitive closure of a relation , or widest paths between all pairs of vertices in a weighted graph.

In graph theory, a path in a graph is a finite or infinite sequence of edges which joins a sequence of vertices which, by most definitions, are all distinct. A directed path in a directed graph is a finite or infinite sequence of edges which joins a sequence of distinct vertices, but with the added restriction that the edges be all directed in the same direction.
Johnson's algorithm is a way to find the shortest paths between all pairs of vertices in an edge-weighted directed graph. It allows some of the edge weights to be negative numbers, but no negative-weight cycles may exist. It works by using the Bellman–Ford algorithm to compute a transformation of the input graph that removes all negative weights, allowing Dijkstra's algorithm to be used on the transformed graph. It is named after Donald B. Johnson, who first published the technique in 1977.
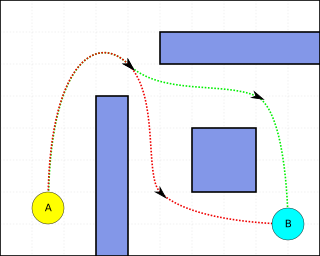
Pathfinding or pathing is the plotting, by a computer application, of the shortest route between two points. It is a more practical variant on solving mazes. This field of research is based heavily on Dijkstra's algorithm for finding the shortest path on a weighted graph.
Edge disjoint shortest pair algorithm is an algorithm in computer network routing. The algorithm is used for generating the shortest pair of edge disjoint paths between a given pair of vertices. For an undirected graph G(V, E), it is stated as follows:
- Run the shortest path algorithm for the given pair of vertices
- Replace each edge of the shortest path by a single arc directed towards the source vertex
- Make the length of each of the above arcs negative
- Run the shortest path algorithm (Note: the algorithm should accept negative costs)
- Erase the overlapping edges of the two paths found, and reverse the direction of the remaining arcs on the first shortest path such that each arc on it is directed towards the destination vertex now. The desired pair of paths results.

Livewire, is a segmentation technique which allows a user to select regions of interest to be extracted quickly and accurately, using simple mouse clicks. It is based on the lowest cost path algorithm, by Edsger W. Dijkstra. Firstly convolve the image with a Sobel filter to extract edges. Each pixel of the resulting image is a vertex of the graph and has edges going to the 4 pixels around it, as up, down, left, right. The edge costs are defined based on a cost function. In 1995, Eric N. Mortensen and William A. Barrett made some extension work on livewire segmentation tool, which is known as Intelligent Scissors.
In mathematics and computer science, a shortest-path tree rooted at a vertex v of a connected, undirected graph G is a spanning tree T of G, such that the path distance from root v to any other vertex u in T is the shortest path distance from v to u in G.

In the study of image processing, a watershed is a transformation defined on a grayscale image. The name refers metaphorically to a geological watershed, or drainage divide, which separates adjacent drainage basins. The watershed transformation treats the image it operates upon like a topographic map, with the brightness of each point representing its height, and finds the lines that run along the tops of ridges.
In theoretical computer science and network routing, Suurballe's algorithm is an algorithm for finding two disjoint paths in a nonnegatively-weighted directed graph, so that both paths connect the same pair of vertices and have minimum total length. The algorithm was conceived by John W. Suurballe and published in 1974. The main idea of Suurballe's algorithm is to use Dijkstra's algorithm to find one path, to modify the weights of the graph edges, and then to run Dijkstra's algorithm a second time. The output of the algorithm is formed by combining these two paths, discarding edges that are traversed in opposite directions by the paths, and using the remaining edges to form the two paths to return as the output. The modification to the weights is similar to the weight modification in Johnson's algorithm, and preserves the non-negativity of the weights while allowing the second instance of Dijkstra's algorithm to find the correct second path.
In graph algorithms, the widest path problem is the problem of finding a path between two designated vertices in a weighted graph, maximizing the weight of the minimum-weight edge in the path. The widest path problem is also known as the maximum capacity path problem. It is possible to adapt most shortest path algorithms to compute widest paths, by modifying them to use the bottleneck distance instead of path length. However, in many cases even faster algorithms are possible.
The Shortest Path Faster Algorithm (SPFA) is an improvement of the Bellman–Ford algorithm which computes single-source shortest paths in a weighted directed graph. The algorithm is believed to work well on random sparse graphs and is particularly suitable for graphs that contain negative-weight edges. However, the worst-case complexity of SPFA is the same as that of Bellman–Ford, so for graphs with nonnegative edge weights Dijkstra's algorithm is preferred. The SPFA algorithm was first published by Edward F. Moore in 1959, as a generalization of breadth first search; SPFA is Moore's “Algorithm D.” The name, “Shortest Path Faster Algorithm (SPFA),” was given by FanDing Duan, a Chinese researcher who rediscovered the algorithm in 1994.
The k shortest path routing problem is a generalization of the shortest path routing problem in a given network. It asks not only about a shortest path but also about next k−1 shortest paths. A variation of the problem is the loopless k shortest paths.
Yen's algorithm computes single-source K-shortest loopless paths for a graph with non-negative edge cost. The algorithm was published by Jin Y. Yen in 1971 and employs any shortest path algorithm to find the best path, then proceeds to find K − 1 deviations of the best path.
References
- 1 2 3 4 5 6 7 8 9 10 Falcao, A.X. Stolfi, J. de Alencar Lotufo, R. : "The image foresting transform: theory, algorithms, and applications", In IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 26, NO. 1, JANUARY 2004
- 1 2 E.W. Dijkstra, “A Note on Two Problems in Connexion with Graphs,” Numerische Mathematik, vol. 1, pp. 269-271, 1959
- ↑ E.F. Moore, “The Shortest Path through a Maze,” Proc. Int’l Symp. Theory of Switching, pp. 285-292, Apr. 1959
- ↑ R. Bellman, “On a Routing Problem,” Quarterly of Applied Math., vol. 16, pp. 87-90, 1958
- ↑ R.B. Dial, “Shortest-Path Forest with Topological Ordering,” Comm. ACM, vol. 12, no. 11, pp. 632-633, Nov. 1969