Related Research Articles
In computing, a context switch is the process of storing the state of a process or thread, so that it can be restored and resume execution at a later point, and then restoring a different, previously saved, state. This allows multiple processes to share a single central processing unit (CPU), and is an essential feature of a multiprogramming or multitasking operating system. In a traditional CPU, each process - a program in execution - utilizes the various CPU registers to store data and hold the current state of the running process. However, in a multitasking operating system, the operating system switches between processes or threads to allow the execution of multiple processes simultaneously. For every switch, the operating system must save the state of the currently running process, followed by loading the next process state, which will run on the CPU. This sequence of operations that stores the state of the running process and the loading of the following running process is called a context switch.

In computing, a device driver is a computer program that operates or controls a particular type of device that is attached to a computer or automaton. A driver provides a software interface to hardware devices, enabling operating systems and other computer programs to access hardware functions without needing to know precise details about the hardware being used.

In computer science, a microkernel is the near-minimum amount of software that can provide the mechanisms needed to implement an operating system (OS). These mechanisms include low-level address space management, thread management, and inter-process communication (IPC).
A monolithic kernel is an operating system architecture with the entire operating system running in kernel space. The monolithic model differs from other architectures such as the microkernel in that it alone defines a high-level virtual interface over computer hardware. A set of primitives or system calls implement all operating system services such as process management, concurrency, and memory management.

In computing, a process is the instance of a computer program that is being executed by one or many threads. There are many different process models, some of which are light weight, but almost all processes are rooted in an operating system (OS) process which comprises the program code, assigned system resources, physical and logical access permissions, and data structures to initiate, control and coordinate execution activity. Depending on the OS, a process may be made up of multiple threads of execution that execute instructions concurrently.
L4 is a family of second-generation microkernels, used to implement a variety of types of operating systems (OS), though mostly for Unix-like, Portable Operating System Interface (POSIX) compliant types.
In computing, scheduling is the action of assigning resources to perform tasks. The resources may be processors, network links or expansion cards. The tasks may be threads, processes or data flows.
RTLinux is a hard realtime real-time operating system (RTOS) microkernel that runs the entire Linux operating system as a fully preemptive process. The hard real-time property makes it possible to control robots, data acquisition systems, manufacturing plants, and other time-sensitive instruments and machines from RTLinux applications. The design was patented. Despite the similar name, it is not related to the Real-Time Linux project of the Linux Foundation.

XNU is the computer operating system (OS) kernel developed at Apple Inc. since December 1996 for use in the Mac OS X operating system and released as free and open-source software as part of the Darwin OS, which, in addition to being the basis for macOS, is also the basis for Apple TV Software, iOS, iPadOS, watchOS, visionOS, and tvOS.

An O(1) scheduler is a kernel scheduling design that can schedule processes within a constant amount of time, regardless of how many processes are running on the operating system. This is an improvement over previously used O(n) schedulers, which schedule processes in an amount of time that scales linearly based on the amounts of inputs.
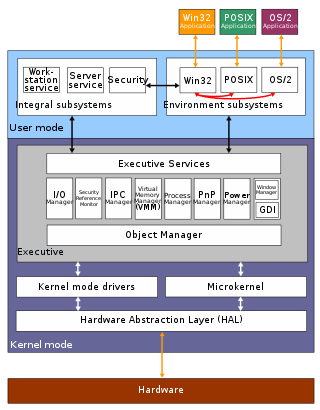
The architecture of Windows NT, a line of operating systems produced and sold by Microsoft, is a layered design that consists of two main components, user mode and kernel mode. It is a preemptive, reentrant multitasking operating system, which has been designed to work with uniprocessor and symmetrical multiprocessor (SMP)-based computers. To process input/output (I/O) requests, it uses packet-driven I/O, which utilizes I/O request packets (IRPs) and asynchronous I/O. Starting with Windows XP, Microsoft began making 64-bit versions of Windows available; before this, there were only 32-bit versions of these operating systems.
In computing, preemption is the act of temporarily interrupting an executing task, with the intention of resuming it at a later time. This interrupt is done by an external scheduler with no assistance or cooperation from the task. This preemptive scheduler usually runs in the most privileged protection ring, meaning that interruption and then resumption are considered highly secure actions. Such changes to the currently executing task of a processor are known as context switching.
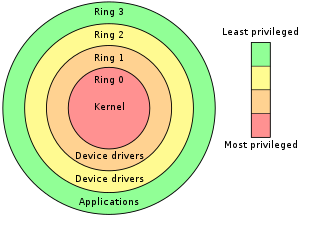
In computer science, hierarchical protection domains, often called protection rings, are mechanisms to protect data and functionality from faults and malicious behavior.
A hybrid kernel is an operating system kernel architecture that attempts to combine aspects and benefits of microkernel and monolithic kernel architectures used in operating systems.

Minix 3 is a small, Unix-like operating system. It is published under a BSD-3-Clause license and is a successor project to the earlier versions, Minix 1 and 2.
The Linux booting process involves multiple stages and is in many ways similar to the BSD and other Unix-style boot processes, from which it derives. Although the Linux booting process depends very much on the computer architecture, those architectures share similar stages and software components, including system startup, bootloader execution, loading and startup of a Linux kernel image, and execution of various startup scripts and daemons. Those are grouped into 4 steps: system startup, bootloader stage, kernel stage, and init process. When a Linux system is powered up or reset, its processor will execute a specific firmware/program for system initialization, such as Power-on self-test, invoking the reset vector to start a program at a known address in flash/ROM, then load the bootloader into RAM for later execution. In personal computer (PC), not only limited to Linux-distro PC, this firmware/program is called BIOS, which is stored in the mainboard. In embedded Linux system, this firmware/program is called boot ROM. After being loaded into RAM, bootloader will execute to load the second-stage bootloader. The second-stage bootloader will load the kernel image into memory, decompress and initialize it then pass control to this kernel image. Second-stage bootloader also performs several operation on the system such as system hardware check, mounting the root device, loading the necessary kernel modules, etc. Finally, the first user-space process starts, and other high-level system initializations are performed.

The kernel is a computer program at the core of a computer's operating system and generally has complete control over everything in the system. The kernel is also responsible for preventing and mitigating conflicts between different processes. It is the portion of the operating system code that is always resident in memory and facilitates interactions between hardware and software components. A full kernel controls all hardware resources via device drivers, arbitrates conflicts between processes concerning such resources, and optimizes the utilization of common resources e.g. CPU & cache usage, file systems, and network sockets. On most systems, the kernel is one of the first programs loaded on startup. It handles the rest of startup as well as memory, peripherals, and input/output (I/O) requests from software, translating them into data-processing instructions for the central processing unit.

The Linux kernel is a free and open-source, UNIX-like kernel that is used in many computer systems worldwide. The kernel was created by Linus Torvalds in 1991 and soon after was adopted as the kernel for the GNU operating system (OS) which was created to be a free replacement for Unix.
The Brain Fuck Scheduler (BFS) is a process scheduler designed for the Linux kernel in August 2009 based on earliest eligible virtual deadline first scheduling (EEVDF), as an alternative to the Completely Fair Scheduler (CFS) and the O(1) scheduler. BFS was created by Con Kolivas.

The NetBSD rump kernel is the first implementation of the "anykernel" concept where drivers either can be compiled into or run in the monolithic kernel or in user space on top of a light-weight kernel. The NetBSD drivers can be used on top of the rump kernel on a wide range of POSIX operating systems, such as the Hurd, Linux, NetBSD, DragonFly BSD, Solaris kernels and even Cygwin, along with the file system utilities built with the rump libraries. The rump kernels can also run without POSIX directly on top of the Xen hypervisor, an L4 microkernel using the Genode OS Framework or even on "OS-less" bare metal.
References
- 1 2 "Preemption under Linux". kernelnewbies.org. 2009-08-22. Retrieved 2016-06-10.
- 1 2 Jonathan Corbet (2003-02-24). "Driver porting: the preemptible kernel". LWN.net . Retrieved 2016-06-10.
- ↑ "FreeBSD Architecture Handbook, Chapter 8. SMPng Design Document, Section 8.3. General Architecture and Design". freebsd.org. Retrieved 2016-06-10.
- ↑ Robert Love (2002-05-01). "Lowering Latency in Linux: Introducing a Preemptible Kernel". Linux Journal . Retrieved 2016-06-10.
- ↑ Robert Love (2010). Linux Kernel Development (3 ed.). Pearson Education. ISBN 978-0672329463.