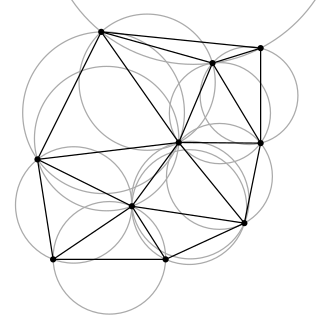
In mathematics and computational geometry, a Delaunay triangulation for a given set P of discrete points in a general position is a triangulation DT(P) such that no point in P is inside the circumcircle of any triangle in DT(P). Delaunay triangulations maximize the minimum of all the angles of the triangles in the triangulation; they tend to avoid sliver triangles. The triangulation is named after Boris Delaunay for his work on this topic from 1934.

In geometry, the convex hull or convex envelope or convex closure of a shape is the smallest convex set that contains it. The convex hull may be defined either as the intersection of all convex sets containing a given subset of a Euclidean space, or equivalently as the set of all convex combinations of points in the subset. For a bounded subset of the plane, the convex hull may be visualized as the shape enclosed by a rubber band stretched around the subset.
Computational geometry is a branch of computer science devoted to the study of algorithms which can be stated in terms of geometry. Some purely geometrical problems arise out of the study of computational geometric algorithms, and such problems are also considered to be part of computational geometry. While modern computational geometry is a recent development, it is one of the oldest fields of computing with a history stretching back to antiquity.

In geometry, the 24-cell is the convex regular 4-polytope (four-dimensional analogue of a Platonic solid) with Schläfli symbol {3,4,3}. It is also called C24, or the icositetrachoron, octaplex (short for "octahedral complex"), icosatetrahedroid, octacube, hyper-diamond or polyoctahedron, being constructed of octahedral cells.
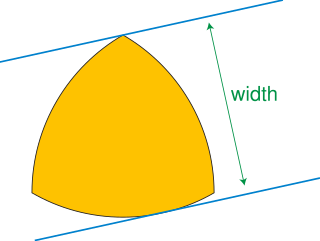
In geometry, a curve of constant width is a simple closed curve in the plane whose width is the same in all directions. The shape bounded by a curve of constant width is a body of constant width or an orbiform, the name given to these shapes by Leonhard Euler. Standard examples are the circle and the Reuleaux triangle. These curves can also be constructed using circular arcs centered at crossings of an arrangement of lines, as the involutes of certain curves, or by intersecting circles centered on a partial curve.

Geometric graph theory in the broader sense is a large and amorphous subfield of graph theory, concerned with graphs defined by geometric means. In a stricter sense, geometric graph theory studies combinatorial and geometric properties of geometric graphs, meaning graphs drawn in the Euclidean plane with possibly intersecting straight-line edges, and topological graphs, where the edges are allowed to be arbitrary continuous curves connecting the vertices, thus it is "the theory of geometric and topological graphs". Geometric graphs are also known as spatial networks.

In geometry, a set K ⊂ Rd is defined to be orthogonally convex if, for every line L that is parallel to one of standard basis vectors, the intersection of K with L is empty, a point, or a single segment. The term "orthogonal" refers to corresponding Cartesian basis and coordinates in Euclidean space, where different basis vectors are perpendicular, as well as corresponding lines. Unlike ordinary convex sets, an orthogonally convex set is not necessarily connected.

In Euclidean plane geometry, a pseudotriangle (pseudo-triangle) is the simply connected subset of the plane that lies between any three mutually tangent convex sets. A pseudotriangulation (pseudo-triangulations) is a partition of a region of the plane into pseudotriangles, and a pointed pseudotriangulation is a pseudotriangulation in which at each vertex the incident edges span an angle of less than π.
The dynamic convex hull problem is a class of dynamic problems in computational geometry. The problem consists in the maintenance, i.e., keeping track, of the convex hull for input data undergoing a sequence of discrete changes, i.e., when input data elements may be inserted, deleted, or modified. It should be distinguished from the kinetic convex hull, which studies similar problems for continuously moving points. Dynamic convex hull problems may be distinguished by the types of the input data and the allowed types of modification of the input data.
In computational geometry, the smallest enclosing box problem is that of finding the oriented minimum bounding box enclosing a set of points. It is a type of bounding volume. "Smallest" may refer to volume, area, perimeter, etc. of the box.

In computational geometry, the method of rotating calipers is an algorithm design technique that can be used to solve optimization problems including finding the width or diameter of a set of points.

In geometry, a convex curve is a plane curve that has a supporting line through each of its points. There are many other equivalent definitions of these curves, going back to Archimedes. Examples of convex curves include the convex polygons, the boundaries of convex sets, and the graphs of convex functions. Important subclasses of convex curves include the closed convex curves, the smooth curves that are convex, and the strictly convex curves, which have the additional property that each supporting line passes through a unique point of the curve.
A kinetic data structure is a data structure used to track an attribute of a geometric system that is moving continuously. For example, a kinetic convex hull data structure maintains the convex hull of a group of moving points. The development of kinetic data structures was motivated by computational geometry problems involving physical objects in continuous motion, such as collision or visibility detection in robotics, animation or computer graphics.
A kinetic convex hull data structure is a kinetic data structure that maintains the convex hull of a set of continuously moving points. It should be distinguished from dynamic convex hull data structures, which handle points undergoing discrete changes such as insertions or deletions of points rather than continuous motion.
A kinetic closest pair data structure is a kinetic data structure that maintains the closest pair of points, given a set P of n points that are moving continuously with time in a metric space. While many efficient algorithms were known in the static case, they proved hard to kinetize, so new static algorithms were developed to solve this problem.
A kinetic diameter data structure is a kinetic data structure which maintains the diameter of a set of moving points. The diameter of a set of moving points is the maximum distance between any pair of points in the set. In the two dimensional case, the kinetic data structure for kinetic convex hull can be used to construct a kinetic data structure for the diameter of a moving point set that is responsive, compact and efficient.
A Kinetic Priority Queue is an abstract kinetic data structure. It is a variant of a priority queue designed to maintain the maximum priority element when the priority of every element is changing as a continuous function of time. Kinetic priority queues have been used as components of several kinetic data structures, as well as to solve some important non-kinetic problems such as the k-set problem and the connected red blue segments intersection problem.
A kinetic width data structure is a kinetic data structure which maintains the width of a set of moving points. In 2D, the width of a point set is the minimum distance between two parallel lines that contain the point set in the strip between them. For the two dimensional case, the kinetic data structure for kinetic convex hull can be used to construct a kinetic data structure for the width of a point set that is responsive, compact and efficient.

In discrete geometry, an opaque set is a system of curves or other set in the plane that blocks all lines of sight across a polygon, circle, or other shape. Opaque sets have also been called barriers, beam detectors, opaque covers, or opaque forests. Opaque sets were introduced by Stefan Mazurkiewicz in 1916, and the problem of minimizing their total length was posed by Frederick Bagemihl in 1959.
