In mathematics and theoretical physics, a large diffeomorphism is an equivalence class of diffeomorphisms under the equivalence relation where diffeomorphisms that can be continuously connected to each other are in the same equivalence class.
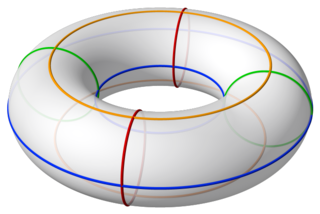
For example, a two-dimensional real torus has a SL(2,Z) group of large diffeomorphisms by which the one-cycles of the torus are transformed into their integer linear combinations. This group of large diffeomorphisms is called the modular group.
More generally, for a surfaceS, the structure of self-homeomorphisms up to homotopy is known as the mapping class group. It is known (for compact, orientableS) that this is isomorphic with the automorphism group of the fundamental group of S. This is consistent with the genus 1 case, stated above, if one takes into account that then the fundamental group is Z2, on which the modular group acts as automorphisms (as a subgroup of index 2 in all automorphisms, since the orientation may also be reverse, by a transformation with determinant −1).
In mathematics, a diffeomorphism is an isomorphism of smooth manifolds. It is an invertible function that maps one differentiable manifold to another such that both the function and its inverse are differentiable.
In mathematics, an equivalence relation is a binary relation that is reflexive, symmetric and transitive. The equipollence relation between line segments in geometry is a common example of an equivalence relation.
In mathematics, an isomorphism is a structure-preserving mapping between two structures of the same type that can be reversed by an inverse mapping. Two mathematical structures are isomorphic if an isomorphism exists between them. The word isomorphism is derived from the Ancient Greek: ἴσοςisos "equal", and μορφήmorphe "form" or "shape".
In geometry, a torus is a surface of revolution generated by revolving a circle in three-dimensional space one full revolution about an axis that is coplanar with the circle. The main types of toruses include ring toruses, horn toruses, and spindle toruses. A ring torus is sometimes colloquially referred to as a donut or doughnut.
In mathematics, particularly in complex analysis, a Riemann surface is a connected one-dimensional complex manifold. These surfaces were first studied by and are named after Bernhard Riemann. Riemann surfaces can be thought of as deformed versions of the complex plane: locally near every point they look like patches of the complex plane, but the global topology can be quite different. For example, they can look like a sphere or a torus or several sheets glued together.
In mathematics, monodromy is the study of how objects from mathematical analysis, algebraic topology, algebraic geometry and differential geometry behave as they "run round" a singularity. As the name implies, the fundamental meaning of monodromy comes from "running round singly". It is closely associated with covering maps and their degeneration into ramification; the aspect giving rise to monodromy phenomena is that certain functions we may wish to define fail to be single-valued as we "run round" a path encircling a singularity. The failure of monodromy can be measured by defining a monodromy group: a group of transformations acting on the data that encodes what happens as we "run round" in one dimension. Lack of monodromy is sometimes called polydromy.
In mathematics, conformal geometry is the study of the set of angle-preserving (conformal) transformations on a space.
In mathematics, the modular group is the projective special linear group of 2 × 2 matrices with integer coefficients and determinant 1. The matrices A and −A are identified. The modular group acts on the upper-half of the complex plane by fractional linear transformations, and the name "modular group" comes from the relation to moduli spaces and not from modular arithmetic.
In mathematics, especially in the group theoretic area of algebra, the projective linear group (also known as the projective general linear group or PGL) is the induced action of the general linear group of a vector space V on the associated projective space P(V). Explicitly, the projective linear group is the quotient group
In mathematics, a linear fractional transformation is, roughly speaking, an invertible transformation of the form
Bosonic string theory is the original version of string theory, developed in the late 1960s and named after Satyendra Nath Bose. It is so called because it contains only bosons in the spectrum.
In mathematics, in the subfield of geometric topology, the mapping class group is an important algebraic invariant of a topological space. Briefly, the mapping class group is a certain discrete group corresponding to symmetries of the space.
In mathematics, a fundamental polygon can be defined for every compact Riemann surface of genus greater than 0. It encodes not only the topology of the surface through its fundamental group but also determines the Riemann surface up to conformal equivalence. By the uniformization theorem, every compact Riemann surface has simply connected universal covering surface given by exactly one of the following:
In mathematics, structural stability is a fundamental property of a dynamical system which means that the qualitative behavior of the trajectories is unaffected by small perturbations.
In mathematics, the special linear group SL(2, R) or SL2(R) is the group of 2 × 2 real matrices with determinant one:
In mathematics, Out(Fn) is the outer automorphism group of a free group on n generators. These groups play an important role in geometric group theory.
In the mathematical subject of geometric group theory, a train track map is a continuous map f from a finite connected graph to itself which is a homotopy equivalence and which has particularly nice cancellation properties with respect to iterations. This map sends vertices to vertices and edges to nontrivial edge-paths with the property that for every edge e of the graph and for every positive integer n the path fn(e) is immersed, that is fn(e) is locally injective on e. Train-track maps are a key tool in analyzing the dynamics of automorphisms of finitely generated free groups and in the study of the Culler–Vogtmann Outer space.
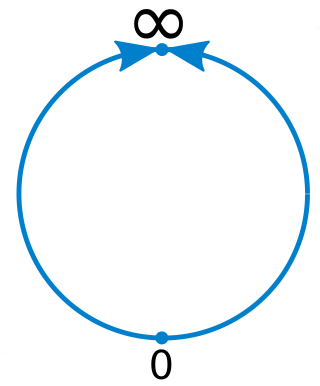
In mathematics, the Riemann sphere, named after Bernhard Riemann, is a model of the extended complex plane: the complex plane plus one point at infinity. This extended plane represents the extended complex numbers, that is, the complex numbers plus a value for infinity. With the Riemann model, the point is near to very large numbers, just as the point is near to very small numbers.
In mathematics, and more precisely in topology, the mapping class group of a surface, sometimes called the modular group or Teichmüller modular group, is the group of homeomorphisms of the surface viewed up to continuous deformation. It is of fundamental importance for the study of 3-manifolds via their embedded surfaces and is also studied in algebraic geometry in relation to moduli problems for curves.
In geometry, a real projective line is a projective line over the real numbers. It is an extension of the usual concept of a line that has been historically introduced to solve a problem set by visual perspective: two parallel lines do not intersect but seem to intersect "at infinity". For solving this problem, points at infinity have been introduced, in such a way that in a real projective plane, two distinct projective lines meet in exactly one point. The set of these points at infinity, the "horizon" of the visual perspective in the plane, is a real projective line. It is the set of directions emanating from an observer situated at any point, with opposite directions identified.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.