Related Research Articles

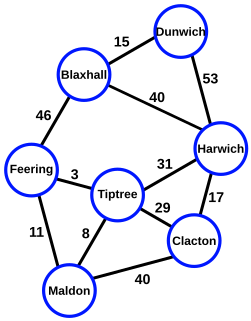
A minimum spanning tree (MST) or minimum weight spanning tree is a subset of the edges of a connected, edge-weighted undirected graph that connects all the vertices together, without any cycles and with the minimum possible total edge weight. That is, it is a spanning tree whose sum of edge weights is as small as possible. More generally, any edge-weighted undirected graph has a minimum spanning forest, which is a union of the minimum spanning trees for its connected components.
Kruskal's algorithm finds a minimum spanning forest of an undirected edge-weighted graph. If the graph is connected, it finds a minimum spanning tree. It is a greedy algorithm in graph theory as in each step it adds the next lowest-weight edge that will not form a cycle to the minimum spanning forest.

In computer science, Prim's algorithm is a greedy algorithm that finds a minimum spanning tree for a weighted undirected graph. This means it finds a subset of the edges that forms a tree that includes every vertex, where the total weight of all the edges in the tree is minimized. The algorithm operates by building this tree one vertex at a time, from an arbitrary starting vertex, at each step adding the cheapest possible connection from the tree to another vertex.

Borůvka's algorithm is a greedy algorithm for finding a minimum spanning tree in a graph, or a minimum spanning forest in the case of a graph that is not connected.

In graph theory, a component of an undirected graph is a connected subgraph that is not part of any larger connected subgraph. The components of any graph partition its vertices into disjoint sets, and are the induced subgraphs of those sets. A graph that is itself connected has exactly one component, consisting of the whole graph. Components are sometimes called connected components.

In digital image processing and computer vision, image segmentation is the process of partitioning a digital image into multiple image segments, also known as image regions or image objects. The goal of segmentation is to simplify and/or change the representation of an image into something that is more meaningful and easier to analyze. Image segmentation is typically used to locate objects and boundaries in images. More precisely, image segmentation is the process of assigning a label to every pixel in an image such that pixels with the same label share certain characteristics.

A Euclidean minimum spanning tree of a finite set of points in the Euclidean plane or higher-dimensional Euclidean space connects the points by a system of line segments with the points as endpoints, minimizing the total length of the segments. In it, any two points can reach each other along a path through the line segments. It can be found as the minimum spanning tree of a complete graph with the points as vertices and the Euclidean distances between points as edge weights.
The distributed minimum spanning tree (MST) problem involves the construction of a minimum spanning tree by a distributed algorithm, in a network where nodes communicate by message passing. It is radically different from the classical sequential problem, although the most basic approach resembles Borůvka's algorithm. One important application of this problem is to find a tree that can be used for broadcasting. In particular, if the cost for a message to pass through an edge in a graph is significant, a MST can minimize the total cost for a source process to communicate with all the other processes in the network.
Connected-component labeling (CCL), connected-component analysis (CCA), blob extraction, region labeling, blob discovery, or region extraction is an algorithmic application of graph theory, where subsets of connected components are uniquely labeled based on a given heuristic. Connected-component labeling is not to be confused with segmentation.
As applied in the field of computer vision, graph cut optimization can be employed to efficiently solve a wide variety of low-level computer vision problems, such as image smoothing, the stereo correspondence problem, image segmentation, object co-segmentation, and many other computer vision problems that can be formulated in terms of energy minimization. Many of these energy minimization problems can be approximated by solving a maximum flow problem in a graph. Under most formulations of such problems in computer vision, the minimum energy solution corresponds to the maximum a posteriori estimate of a solution. Although many computer vision algorithms involve cutting a graph, the term "graph cuts" is applied specifically to those models which employ a max-flow/min-cut optimization.

In the study of image processing, a watershed is a transformation defined on a grayscale image. The name refers metaphorically to a geological watershed, or drainage divide, which separates adjacent drainage basins. The watershed transformation treats the image it operates upon like a topographic map, with the brightness of each point representing its height, and finds the lines that run along the tops of ridges.
In computer vision, maximally stable extremal regions (MSER) are used as a method of blob detection in images. This technique was proposed by Matas et al. to find correspondences between image elements from two images with different viewpoints. This method of extracting a comprehensive number of corresponding image elements contributes to the wide-baseline matching, and it has led to better stereo matching and object recognition algorithms.
The image segmentation problem is concerned with partitioning an image into multiple regions according to some homogeneity criterion. This article is primarily concerned with graph theoretic approaches to image segmentation applying graph partitioning via minimum cut or maximum cut. Segmentation-based object categorization can be viewed as a specific case of spectral clustering applied to image segmentation.
GrabCut is an image segmentation method based on graph cuts.
The random walker algorithm is an algorithm for image segmentation. In the first description of the algorithm, a user interactively labels a small number of pixels with known labels, e.g., "object" and "background". The unlabeled pixels are each imagined to release a random walker, and the probability is computed that each pixel's random walker first arrives at a seed bearing each label, i.e., if a user places K seeds, each with a different label, then it is necessary to compute, for each pixel, the probability that a random walker leaving the pixel will first arrive at each seed. These probabilities may be determined analytically by solving a system of linear equations. After computing these probabilities for each pixel, the pixel is assigned to the label for which it is most likely to send a random walker. The image is modeled as a graph, in which each pixel corresponds to a node which is connected to neighboring pixels by edges, and the edges are weighted to reflect the similarity between the pixels. Therefore, the random walk occurs on the weighted graph.
In graph algorithms, the widest path problem is the problem of finding a path between two designated vertices in a weighted graph, maximizing the weight of the minimum-weight edge in the path. The widest path problem is also known as the maximum capacity path problem. It is possible to adapt most shortest path algorithms to compute widest paths, by modifying them to use the bottleneck distance instead of path length. However, in many cases even faster algorithms are possible.
Statistical region merging (SRM) is an algorithm used for image segmentation. The algorithm is used to evaluate the values within a regional span and grouped together based on the merging criteria, resulting in a smaller list. Some useful examples are creating a group of generations within a population, or in image processing, grouping a number of neighboring pixels based on their shades that fall within a particular threshold.

Foreground detection is one of the major tasks in the field of computer vision and image processing whose aim is to detect changes in image sequences. Background subtraction is any technique which allows an image's foreground to be extracted for further processing.
In computer vision, rigid motion segmentation is the process of separating regions, features, or trajectories from a video sequence into coherent subsets of space and time. These subsets correspond to independent rigidly moving objects in the scene. The goal of this segmentation is to differentiate and extract the meaningful rigid motion from the background and analyze it. Image segmentation techniques labels the pixels to be a part of pixels with certain characteristics at a particular time. Here, the pixels are segmented depending on its relative movement over a period of time i.e. the time of the video sequence.
In graph theory a minimum spanning tree (MST) of a graph with and is a tree subgraph of that contains all of its vertices and is of minimum weight.
References
- ↑ Haralick, Robert M.; Shapiro, Linda G. (January 1985), "Image segmentation techniques", Computer Vision, Graphics, and Image Processing , 29 (1): 100–132, doi:10.1016/s0734-189x(85)90153-7
- ↑ Iivarinen, Jukka; Peura, Markus; Särelä, Jaakko; Visa, Ari (1997), "Comparison of combined shape descriptors for irregular objects", in Clark, Adrian F. (ed.), Proceedings of the British Machine Vision Conference 1997, BMVC 1997, University of Essex, UK, 1997, British Machine Vision Association
- ↑ Chen, Minghua; Pavlidis, Theodosios (1990), "Image seaming for segmentation on parallel architecture", IEEE Transactions on Pattern Analysis and Machine Intelligence , 12 (6): 588–594, doi:10.1109/34.56195
- ↑ Felzenszwalb, Pedro F.; Huttenlocher, Daniel P. (2004), "Efficient graph-based image segmentation", International Journal of Computer Vision , 59 (2): 167–181, doi:10.1023/B:VISI.0000022288.19776.77, S2CID 207663697
- ↑ Harfst, Gregory C.; Reingold, Edward M. (2000), "A potential-based amortized analysis of the union-find data structure", SIGACT News , 31 (3): 86–95, doi:10.1145/356458.356463, S2CID 14779624
- ↑ Wassenberg, Jan; Middelmann, Wolfgang; Sanders, Peter (2009), "An efficient parallel algorithm for graph-based image segmentation", in Jiang, Xiaoyi; Petkov, Nicolai (eds.), Computer Analysis of Images and Patterns, 13th International Conference, CAIP 2009, Münster, Germany, September 2-4, 2009, Proceedings, Lecture Notes in Computer Science, vol. 5702, Springer, pp. 1003–1010, doi:10.1007/978-3-642-03767-2_122
- ↑ Sağlam, Ali; Baykan, Nurdan Akhan (2017), "Sequential image segmentation based on minimum spanning tree representation", Pattern Recognition Letters , 87: 155–162, Bibcode:2017PaReL..87..155S, doi:10.1016/j.patrec.2016.06.001