In mathematics, a diffeomorphism is an isomorphism of smooth manifolds. It is an invertible function that maps one differentiable manifold to another such that both the function and its inverse are smooth.
In the mathematical field of algebraic topology, the fundamental group is a mathematical group associated to any given pointed topological space that provides a way to determine when two paths, starting and ending at a fixed base point, can be continuously deformed into each other. It records information about the basic shape, or holes, of the topological space. The fundamental group is the first and simplest homotopy group. The fundamental group is a topological invariant: homeomorphic topological spaces have the same fundamental group.

In the mathematical field of topology, a homeomorphism, topological isomorphism, or bicontinuous function is a continuous function between topological spaces that has a continuous inverse function. Homeomorphisms are the isomorphisms in the category of topological spaces—that is, they are the mappings that preserve all the topological properties of a given space. Two spaces with a homeomorphism between them are called homeomorphic, and from a topological viewpoint they are the same. The word homeomorphism comes from the Greek words ὅμοιος (homoios) = similar or same and μορφή (morphē) = shape, form, introduced to mathematics by Henri Poincaré in 1895.
In mathematics, homology is a general way of associating a sequence of algebraic objects such as abelian groups or modules to other mathematical objects such as topological spaces. Homology groups were originally defined in algebraic topology. Similar constructions are available in a wide variety of other contexts, such as abstract algebra, groups, Lie algebras, Galois theory, and algebraic geometry.
In mathematics, and more specifically in algebraic topology and polyhedral combinatorics, the Euler characteristic is a topological invariant, a number that describes a topological space's shape or structure regardless of the way it is bent. It is commonly denoted by .

In mathematics, orientability is a property of surfaces in Euclidean space that measures whether it is possible to make a consistent choice of surface normal vector at every point. A choice of surface normal allows one to use the right-hand rule to define a "clockwise" direction of loops in the surface, as needed by Stokes' theorem for instance. More generally, orientability of an abstract surface, or manifold, measures whether one can consistently choose a "clockwise" orientation for all loops in the manifold. Equivalently, a surface is orientable if a two-dimensional figure such as in the space cannot be moved (continuously) around the space and back to where it started so that it looks like its own mirror image .
The Riemann–Roch theorem is an important theorem in mathematics, specifically in complex analysis and algebraic geometry, for the computation of the dimension of the space of meromorphic functions with prescribed zeroes and allowed poles. It relates the complex analysis of a connected compact Riemann surface with the surface's purely topological genus g, in a way that can be carried over into purely algebraic settings.

In mathematics, and particularly topology, a fiber bundle is a space that is locally a product space, but globally may have a different topological structure. Specifically, the similarity between a space E and a product space is defined using a continuous surjective map
In mathematics, homotopy groups are used in algebraic topology to classify topological spaces. The first and simplest homotopy group is the fundamental group, which records information about loops in a space. Intuitively, homotopy groups record information about the basic shape, or holes, of a topological space.
In mathematics, the smash product of two pointed spaces and is the quotient of the product space X × Y under the identifications (x, y0) ∼ (x0, y) for all x ∈ X and y ∈ Y. The smash product is itself a pointed space, with basepoint being the equivalence class of. The smash product is usually denoted X ∧ Y or X ⨳ Y. The smash product depends on the choice of basepoints.
In differential topology, an exotic sphere is a differentiable manifold M that is homeomorphic but not diffeomorphic to the standard Euclidean n-sphere. That is, M is a sphere from the point of view of all its topological properties, but carrying a smooth structure that is not the familiar one.
A Seifert fiber space is a 3-manifold together with a "nice" decomposition as a disjoint union of circles. In other words, it is a -bundle over a 2-dimensional orbifold. Most "small" 3-manifolds are Seifert fiber spaces, and they account for all compact oriented manifolds in 6 of the 8 Thurston geometries of the geometrization conjecture.
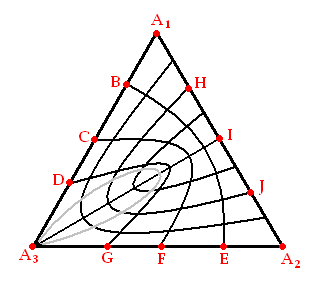
In mathematics, a fundamental polygon can be defined for every compact Riemann surface of genus greater than 0. It encodes not only the topology of the surface through its fundamental group but also determines the Riemann surface up to conformal equivalence. By the uniformization theorem, every compact Riemann surface has simply connected universal covering surface given by exactly one of the following:

In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, each point of an n-dimensional manifold has a neighbourhood that is homeomorphic to the Euclidean space of dimension n. In this more precise terminology, a manifold is referred to as an n-manifold.
In geometry, minimax eversions are a class of sphere eversions, constructed by using half-way models.
In differential geometry, Pu's inequality, proved by Pao Ming Pu, relates the area of an arbitrary Riemannian surface homeomorphic to the real projective plane with the lengths of the closed curves contained in it.

In mathematics, the differential geometry of surfaces deals with the differential geometry of smooth surfaces with various additional structures, most often, a Riemannian metric. Surfaces have been extensively studied from various perspectives: extrinsically, relating to their embedding in Euclidean space and intrinsically, reflecting their properties determined solely by the distance within the surface as measured along curves on the surface. One of the fundamental concepts investigated is the Gaussian curvature, first studied in depth by Carl Friedrich Gauss, who showed that curvature was an intrinsic property of a surface, independent of its isometric embedding in Euclidean space.
In mathematics, especially in the area of topology known as algebraic topology, an induced homomorphism is a homomorphism derived in a canonical way from another map. For example, a continuous map from a topological space X to a space Y induces a group homomorphism from the fundamental group of X to the fundamental group of Y.