
Telemetry is the in situ collection of measurements or other data at remote points and their automatic transmission to receiving equipment (telecommunication) for monitoring. The word is derived from the Greek roots tele, 'remote', and metron, 'measure'. Systems that need external instructions and data to operate require the counterpart of telemetry: telecommand.
Dataflow architecture is a dataflow-based computer architecture that directly contrasts the traditional von Neumann architecture or control flow architecture. Dataflow architectures have no program counter, in concept: the executability and execution of instructions is solely determined based on the availability of input arguments to the instructions, so that the order of instruction execution may be hard to predict.
HAMSAT also known as HAMSAT INDIA, VU2SAT and VO-52 is a microsatellite weighing 42.5 kilograms (93.7 lb), providing amateur radio satellite communications services for Indian and international amateur radio operators. This satellite carries the in-orbit designation of VO-52, and is an OSCAR series satellite.
The design of spacecraft covers a broad area, including the design of both robotic spacecraft, and spacecraft for human spaceflight.

Flight controllers are personnel who aid space flight by working in such Mission Control Centers as NASA's Mission Control Center or ESA's European Space Operations Centre. Flight controllers work at computer consoles and use telemetry to monitor various technical aspects of a space mission in real-time. Each controller is an expert in a specific area and constantly communicates with additional experts in the "back room". The flight director, who leads the flight controllers, monitors the activities of a team of flight controllers, and has overall responsibility for success and safety.

MidSTAR-1 is an artificial satellite produced by the United States Naval Academy Small Satellite Program. It was sponsored by the United States Department of Defense (DoD) Space Test Program (STP), and was launched on March 9, 2007 at 03:10 UTC, aboard an Atlas V expendable launch vehicle from Cape Canaveral Air Force Station. MidSTAR-1 flew along with FalconSat 3, STPSat 1, and CFESat as secondary payloads; the primary payload was Orbital Express.
Astrionics is the science and technology of the development and application of electronic systems, subsystems, and components used in spacecraft. The electronic systems on-board a spacecraft are embedded systems and include attitude determination and control, communications, command and telemetry, and computer systems. Sensors refers to the electronic components on board a spacecraft.
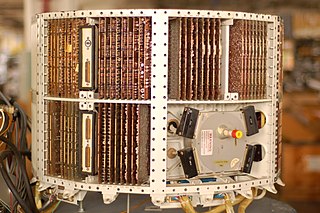
The D-17B (D17B) computer was used in the Minuteman I NS-1OQ missile guidance system. The complete guidance system contained a D-17B computer, the associated stable platform, and power supplies.
The Cornell University Satellite (CUSat) is a nanosatellite developed by Cornell University that launched on 29 September 2013. It used a new algorithm called Carrier-phase Differential GPS (CDGPS) to calibrate global positioning systems to an accuracy of 3 millimeters. This technology can allow multiple spacecraft to travel in close proximity.

Formation Autonomy Spacecraft with Thrust, Relnav, Attitude and Crosslink is a pair of nanosatellites developed and built by students at The University of Texas at Austin. The project is part of a program sponsored by the Air Force Research Laboratory (AFRL), whose goal is to lead the development of affordable space technology. The FASTRAC mission will specifically investigate technologies that facilitate the operation of multiple satellites in formation. These enabling technologies include relative navigation, cross-link communications, attitude determination, and thrust. Due to the high cost of lifting mass into orbit, there is a strong initiative to miniaturize the overall weight of spacecraft. The utilization of formations of satellites, in place of large single satellites, reduces the risk of single point failure and allows for the use of low-cost hardware.
ITUpSAT1, short for Istanbul Technical University picoSatellite-1, is a single CubeSat built by the Faculty of Aeronautics and Astronautics at the Istanbul Technical University. It was launched on 23 September 2009 atop a PSLV-C14 satellite launch vehicle from Satish Dhawan Space Centre, Sriharikota, Andhra Pradesh in India, and became the first Turkish university satellite to orbit the Earth. It was expected to have a minimum of six-month life term, but it is still functioning for over two years. It is a picosatellite with side lengths of 10 centimetres (3.9 in) and a mass of 0.990 kilograms (2.18 lb).
SSETI Express was the first spacecraft to be designed and built by European students and was launched by the European Space Agency. SSETI Express is a small spacecraft, similar in size and shape to a washing machine. On board the student-built spacecraft were three CubeSat picosatellites, extremely small satellites weighing around one kg each. These were deployed one hour and forty minutes after launch. Twenty-one university groups, working from locations spread across Europe and with very different cultural backgrounds, worked together via the internet to jointly create the satellite. The expected lifetime of the mission was planned to be 2 months. SSETI Express encountered an unusually fast mission development: less than 18 months from kick-off in January 2004 to flight-readiness.

Radio Aurora Explorer (RAX) is the first National Science Foundation sponsored CubeSat mission. The RAX mission is a joint effort between SRI International in Menlo Park, California and the University of Michigan in Ann Arbor, Michigan. The chief scientist at SRI International, Dr. Hasan Bahcivan, led his team at SRI to develop the payload while the chief engineer, Dr. James Cutler, led a team of students to develop the satellite bus in the Michigan Exploration Laboratory. There are currently two satellites in the RAX mission.
Jugnu, is an Indian technology demonstration and remote sensing CubeSat satellite which was operated by the Indian Institute of Technology Kanpur. Built under the guidance of Dr. N. S. Vyas, it is a nanosatellite which will be used to provide data for agriculture and disaster monitoring. It is a 3-kilogram (6.6 lb) spacecraft, which measures 34 centimetres (13 in) in length by 10 centimetres (3.9 in) in height and width. Its development programme cost around 25 million rupee. It has a design life of one year.

LituanicaSAT-1 was one of the first two Lithuanian satellites. It was launched along with the second Cygnus spacecraft and 28 Flock-1 CubeSats aboard an Antares 120 carrier rocket flying from Pad 0B at the Mid-Atlantic Regional Spaceport on Wallops Island to the International Space Station. The launch was scheduled to occur in December 2013, but later was rescheduled to 9 January 2014 and occurred then. The satellite was broadcasting greetings of Lithuanian president, Mrs. Dalia Grybauskaitė. The satellite was deployed from the International Space Station via the NanoRacks CubeSat Deployer on February 28, 2014. All LituanicaSAT-1 subsystems have been turned on, tested and proved to be working properly. The mission is considered a complete success by its team of engineers. The mission ended upon the reentry and disintegration of the satellite on July 28, 2014.

A ground segment consists of all the ground-based elements of a space system used by operators and support personnel, as opposed to the space segment and user segment. The ground segment enables management of a spacecraft, and distribution of payload data and telemetry among interested parties on the ground. The primary elements of a ground segment are:

UPSat was the first satellite manufactured in Greece to be successfully launched into orbit, by the University of Patras and Libre Space Foundation. It was part of the QB50 mission with ID GR-02. The UPSat mission was the first satellite launched into orbit made entirely of open-source software and open-source hardware.

The spacecraft bus is a carbon fibre box that houses systems of the telescope and so is the primary support element of the James Webb Space Telescope, launched on 25 December 2021. It hosts a multitude of computing, communication, propulsion, and structural components. The other three elements of the JWST are the Optical Telescope Element (OTE), the Integrated Science Instrument Module (ISIM) and the sunshield. Region 3 of ISIM is also inside the spacecraft bus. Region 3 includes the ISIM Command and Data Handling subsystem and the Mid-Infrared Instrument (MIRI) cryocooler.
A spacecraft command language is a computer command language for commanding spacecraft mission systems. Ultimately such languages are used to command remote spacecraft with telecommands, but they are also used for development and verification of onboard systems, and of ground systems, prior to launch.

OPTOS was a Spanish nanosatellite designed and developed by INTA with support from the European Cooperation for Space Standardization (ECSS) as a low-cost technology demonstrator. It was launched in 2013 and had a service life of three years.