Related Research Articles

In mathematics, differential topology is the field dealing with the topological properties and smooth properties of smooth manifolds. In this sense differential topology is distinct from the closely related field of differential geometry, which concerns the geometric properties of smooth manifolds, including notions of size, distance, and rigid shape. By comparison differential topology is concerned with coarser properties, such as the number of holes in a manifold, its homotopy type, or the structure of its diffeomorphism group. Because many of these coarser properties may be captured algebraically, differential topology has strong links to algebraic topology.
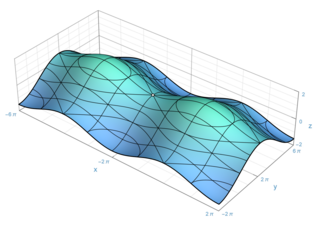
In the part of mathematics referred to as topology, a surface is a two-dimensional manifold. Some surfaces arise as the boundaries of three-dimensional solids; for example, the sphere is the boundary of the solid ball. Other surfaces arise as graphs of functions of two variables; see the figure at right. However, surfaces can also be defined abstractly, without reference to any ambient space. For example, the Klein bottle is a surface that cannot be embedded in three-dimensional Euclidean space.

In mathematics, topology is concerned with the properties of a geometric object that are preserved under continuous deformations, such as stretching, twisting, crumpling, and bending; that is, without closing holes, opening holes, tearing, gluing, or passing through itself.

Algebraic topology is a branch of mathematics that uses tools from abstract algebra to study topological spaces. The basic goal is to find algebraic invariants that classify topological spaces up to homeomorphism, though usually most classify up to homotopy equivalence.
In mathematics, homology is a general way of associating a sequence of algebraic objects, such as abelian groups or modules, with other mathematical objects such as topological spaces. Homology groups were originally defined in algebraic topology. Similar constructions are available in a wide variety of other contexts, such as abstract algebra, groups, Lie algebras, Galois theory, and algebraic geometry.

In mathematics, particularly in complex analysis, a Riemann surface is a connected one-dimensional complex manifold. These surfaces were first studied by and are named after Bernhard Riemann. Riemann surfaces can be thought of as deformed versions of the complex plane: locally near every point they look like patches of the complex plane, but the global topology can be quite different. For example, they can look like a sphere or a torus or several sheets glued together.
In mathematics, Thurston's geometrization conjecture states that each of certain three-dimensional topological spaces has a unique geometric structure that can be associated with it. It is an analogue of the uniformization theorem for two-dimensional surfaces, which states that every simply connected Riemann surface can be given one of three geometries . In three dimensions, it is not always possible to assign a single geometry to a whole topological space. Instead, the geometrization conjecture states that every closed 3-manifold can be decomposed in a canonical way into pieces that each have one of eight types of geometric structure. The conjecture was proposed by William Thurston (1982), and implies several other conjectures, such as the Poincaré conjecture and Thurston's elliptization conjecture.

In mathematics, and particularly topology, a fiber bundle is a space that is locally a product space, but globally may have a different topological structure. Specifically, the similarity between a space and a product space is defined using a continuous surjective map, that in small regions of behaves just like a projection from corresponding regions of to The map called the projection or submersion of the bundle, is regarded as part of the structure of the bundle. The space is known as the total space of the fiber bundle, as the base space, and the fiber.
In algebraic topology, a homology sphere is an n-manifold X having the homology groups of an n-sphere, for some integer . That is,
Herbert Karl Johannes Seifert was a German mathematician known for his work in topology.
The Alexander horned sphere is a pathological object in topology discovered by J. W. Alexander (1924).
In the mathematical field of geometric topology, a Heegaard splitting is a decomposition of a compact oriented 3-manifold that results from dividing it into two handlebodies.

A lens space is an example of a topological space, considered in mathematics. The term often refers to a specific class of 3-manifolds, but in general can be defined for higher dimensions.
In mathematics, an incompressible surface is a surface properly embedded in a 3-manifold, which, in intuitive terms, is a "nontrivial" surface that cannot be simplified. In non-mathematical terms, the surface of a suitcase is compressible, because we could cut the handle and shrink it into the surface. But a Conway sphere is incompressible, because there are essential parts of a knot or link both inside and out, so there is no way to move the entire knot or link to one side of the punctured sphere. The mathematical definition is as follows. There are two cases to consider. A sphere is incompressible if both inside and outside the sphere there are some obstructions that prevent the sphere from shrinking to a point and also prevent the sphere from expanding to encompass all of space. A surface other than a sphere is incompressible if any disk with its boundary on the surface spans a disk in the surface.

In mathematics, a 3-manifold is a space that locally looks like Euclidean 3-dimensional space. A 3-manifold can be thought of as a possible shape of the universe. Just as a sphere looks like a plane to a small enough observer, all 3-manifolds look like our universe does to a small enough observer. This is made more precise in the definition below.

Allen Edward Hatcher is an American topologist.
A Seifert fiber space is a 3-manifold together with a decomposition as a disjoint union of circles. In other words, it is a -bundle over a 2-dimensional orbifold. Many 3-manifolds are Seifert fiber spaces, and they account for all compact oriented manifolds in 6 of the 8 Thurston geometries of the geometrization conjecture.

In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, an n-dimensional manifold, or n-manifold for short, is a topological space with the property that each point has a neighborhood that is homeomorphic to an open subset of n-dimensional Euclidean space.
In algebraic topology and algebraic geometry, a cyclic cover or cyclic covering is a covering space for which the set of covering transformations forms a cyclic group. As with cyclic groups, there may be both finite and infinite cyclic covers.
References
- ↑ Seifert, H. (1980). Seifert and Threlfall, A textbook of topology. W. Threlfall, Joan S. Birman, Julian Eisner. New York: Academic Press. p. 29. ISBN 978-0-12-634850-7. OCLC 316570650.
| | This topology-related article is a stub. You can help Wikipedia by expanding it. |