Java is a high-level, class-based, object-oriented programming language that is designed to have as few implementation dependencies as possible. It is a general-purpose programming language intended to let programmers write once, run anywhere (WORA), meaning that compiled Java code can run on all platforms that support Java without the need to recompile. Java applications are typically compiled to bytecode that can run on any Java virtual machine (JVM) regardless of the underlying computer architecture. The syntax of Java is similar to C and C++, but has fewer low-level facilities than either of them. The Java runtime provides dynamic capabilities that are typically not available in traditional compiled languages.

A Java virtual machine (JVM) is a virtual machine that enables a computer to run Java programs as well as programs written in other languages that are also compiled to Java bytecode. The JVM is detailed by a specification that formally describes what is required in a JVM implementation. Having a specification ensures interoperability of Java programs across different implementations so that program authors using the Java Development Kit (JDK) need not worry about idiosyncrasies of the underlying hardware platform.

An embedded system is a computer system—a combination of a computer processor, computer memory, and input/output peripheral devices—that has a dedicated function within a larger mechanical or electronic system. It is embedded as part of a complete device often including electrical or electronic hardware and mechanical parts. Because an embedded system typically controls physical operations of the machine that it is embedded within, it often has real-time computing constraints. Embedded systems control many devices in common use. In 2009, it was estimated that ninety-eight percent of all microprocessors manufactured were used in embedded systems.

Single instruction, multiple data (SIMD) is a type of parallel processing in Flynn's taxonomy. SIMD can be internal and it can be directly accessible through an instruction set architecture (ISA), but it should not be confused with an ISA. SIMD describes computers with multiple processing elements that perform the same operation on multiple data points simultaneously.
Software development is the process used to create software. Programming and maintaining the source code is the central step of this process, but it also includes conceiving the project, evaluating its feasibility, analyzing the business requirements, software design, testing, to release. Software engineering, in addition to development, also includes project management, employee management, and other overhead functions. Software development may be sequential, in which each step is complete before the next begins, but iterative development methods where multiple steps can be executed at once and earlier steps can be revisited have also been devised to improve flexibility, efficiency, and scheduling.

James Sacra Albus was an American engineer, Senior NIST Fellow and founder and former chief of the Intelligent Systems Division of the Manufacturing Engineering Laboratory at the National Institute of Standards and Technology (NIST).
In computer science, a NOP, no-op, or NOOP is a machine language instruction and its assembly language mnemonic, programming language statement, or computer protocol command that does nothing.
The Blackfin is a family of 16-/32-bit microprocessors developed, manufactured and marketed by Analog Devices. The processors have built-in, fixed-point digital signal processor (DSP) functionality performed by 16-bit multiply–accumulates (MACs), accompanied on-chip by a microcontroller. It was designed for a unified low-power processor architecture that can run operating systems while simultaneously handling complex numeric tasks such as real-time H.264 video encoding.

On-board diagnostics (OBD) is a term referring to a vehicle's self-diagnostic and reporting capability. In the United States, this capability is a requirement to comply with federal emissions standards to detect failures that may increase the vehicle tailpipe emissions to more than 150% of the standard to which it was originally certified.
A GIS software program is a computer program to support the use of a geographic information system, providing the ability to create, store, manage, query, analyze, and visualize geographic data, that is, data representing phenomena for which location is important. The GIS software industry encompasses a broad range of commercial and open-source products that provide some or all of these capabilities within various information technology architectures.

Network Security Services (NSS) is a collection of cryptographic computer libraries designed to support cross-platform development of security-enabled client and server applications with optional support for hardware TLS/SSL acceleration on the server side and hardware smart cards on the client side. NSS provides a complete open-source implementation of cryptographic libraries supporting Transport Layer Security (TLS) / Secure Sockets Layer (SSL) and S/MIME. NSS releases prior to version 3.14 are tri-licensed under the Mozilla Public License 1.1, the GNU General Public License, and the GNU Lesser General Public License. Since release 3.14, NSS releases are licensed under GPL-compatible Mozilla Public License 2.0.
A hierarchical control system (HCS) is a form of control system in which a set of devices and governing software is arranged in a hierarchical tree. When the links in the tree are implemented by a computer network, then that hierarchical control system is also a form of networked control system.
Web-based simulation (WBS) is the invocation of computer simulation services over the World Wide Web, specifically through a web browser. Increasingly, the web is being looked upon as an environment for providing modeling and simulation applications, and as such, is an emerging area of investigation within the simulation community.

The 4D/RCS Reference Model Architecture is a reference model for military unmanned vehicles on how their software components should be identified and organized.
Real-time control system may refer to:
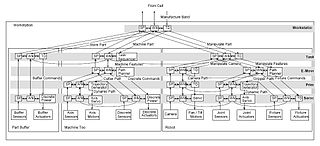
Real-time Control System (RCS) is a reference model architecture, suitable for many software-intensive, real-time computing control problem domains. It defines the types of functions needed in a real-time intelligent control system, and how these functions relate to each other.
The Java Development Kit (JDK) is a distribution of Java technology by Oracle Corporation. It implements the Java Language Specification (JLS) and the Java Virtual Machine Specification (JVMS) and provides the Standard Edition (SE) of the Java Application Programming Interface (API). It is derivative of the community driven OpenJDK which Oracle stewards. It provides software for working with Java applications. Examples of included software are the Java virtual machine, a compiler, performance monitoring tools, a debugger, and other utilities that Oracle considers useful for Java programmers.

An application programming interface (API) is a way for two or more computer programs or components to communicate with each other. It is a type of software interface, offering a service to other pieces of software. A document or standard that describes how to build or use such a connection or interface is called an API specification. A computer system that meets this standard is said to implement or expose an API. The term API may refer either to the specification or to the implementation. Whereas a system's user interface dictates how its end-users interact with the system in question, its API dictates how to write code that takes advantage of that system's capabilities.
LinuxCNC is a free, open-source Linux software system that implements numerical control capability using general purpose computers to control CNC machines. It's mainly intended to run on PC AMD x86-64 systems. Designed by various volunteer developers at linuxcnc.org, it is typically bundled as an ISO file with a modified version of Debian Linux which provides the required real-time kernel.
ETAS GmbH is a German company which designs tools for the development of embedded systems for the automotive industry and other sectors of the embedded industry. ETAS is 100-percent subsidiary of Robert Bosch GmbH.
