
The Global Positioning System (GPS), originally Navstar GPS, is a satellite-based radionavigation system owned by the United States government and operated by the United States Space Force. It is one of the global navigation satellite systems (GNSS) that provides geolocation and time information to a GPS receiver anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. Obstacles such as mountains and buildings block the relatively weak GPS signals.

Surveying or land surveying is the technique, profession, art, and science of determining the terrestrial or three-dimensional positions of points and the distances and angles between them. A land surveying professional is called a land surveyor. These points are usually on the surface of the Earth, and they are often used to establish maps and boundaries for ownership, locations, such as the designed positions of structural components for construction or the surface location of subsurface features, or other purposes required by government or civil law, such as property sales.
Time and frequency transfer is a scheme where multiple sites share a precise reference time or frequency. The technique is commonly used for creating and distributing standard time scales such as International Atomic Time (TAI). Time transfer solves problems such as astronomical observatories correlating observed flashes or other phenomena with each other, as well as cell phone towers coordinating handoffs as a phone moves from one cell to another.

The European Geostationary Navigation Overlay Service (EGNOS) is a satellite based augmentation system (SBAS) developed by the European Space Agency and EUROCONTROL on behalf of the European Commission. Currently, it supplements the GPS by reporting on the reliability and accuracy of their positioning data and sending out corrections. The system will supplement Galileo in a future version.

The Wide Area Augmentation System (WAAS) is an air navigation aid developed by the Federal Aviation Administration to augment the Global Positioning System (GPS), with the goal of improving its accuracy, integrity, and availability. Essentially, WAAS is intended to enable aircraft to rely on GPS for all phases of flight, including precision approaches to any airport within its coverage area. It may be further enhanced with the Local Area Augmentation System (LAAS) also known by the preferred ICAO term Ground-Based Augmentation System (GBAS) in critical areas.
A satellite navigation or satnav system is a system that uses satellites to provide autonomous geo-spatial positioning. It allows small electronic receivers to determine their location to high precision using time signals transmitted along a line of sight by radio from satellites. The system can be used for providing position, navigation or for tracking the position of something fitted with a receiver. The signals also allow the electronic receiver to calculate the current local time to high precision, which allows time synchronisation. These uses are collectively known as Positioning, Navigation and Timing (PNT). Satnav systems operate independently of any telephonic or internet reception, though these technologies can enhance the usefulness of the positioning information generated.

A Differential Global Positioning System (DGPS) is an enhancement to the Global Positioning System (GPS) which provides improved location accuracy, in the range of operations of each system, from the 15-metre (49 ft) nominal GPS accuracy to about 1–3 centimetres (0.39–1.18 in) in case of the best implementations.
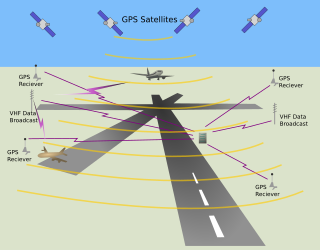
The local-area augmentation system (LAAS) is an all-weather aircraft landing system based on real-time differential correction of the GPS signal. Local reference receivers located around the airport send data to a central location at the airport. This data is used to formulate a correction message, which is then transmitted to users via a VHF Data Link. A receiver on an aircraft uses this information to correct GPS signals, which then provides a standard ILS-style display to use while flying a precision approach. The FAA has stopped using the term LAAS and has transitioned to the International Civil Aviation Organization (ICAO) terminology of Ground-Based Augmentation System (GBAS). While the FAA has indefinitely delayed plans for federal GBAS acquisition, the system can be purchased by airports and installed as a Non-Federal navigation aid.
StarFire is a wide-area differential GPS developed by John Deere's NavCom and precision farming groups. StarFire broadcasts additional "correction information" over satellite L-band frequencies around the world, allowing a StarFire-equipped receiver to produce position measurements accurate to well under one meter, with typical accuracy over a 24-hour period being under 4.5 cm. StarFire is similar to the FAA's differential GPS Wide Area Augmentation System (WAAS), but considerably more accurate due to a number of techniques that improve its receiver-end processing.
The GPS-aided GEO augmented navigation (GAGAN) is an implementation of a regional satellite-based augmentation system (SBAS) by the Government of India. It is a system to improve the accuracy of a GNSS receiver by providing reference signals. The AAI's efforts towards implementation of operational SBAS can be viewed as the first step towards introduction of modern Communication, navigation and surveillance/Air Traffic Management system over Indian airspace.

Augmentation of a global navigation satellite system (GNSS) is a method of improving the navigation system's attributes, such as accuracy, reliability, and availability, through the integration of external information into the calculation process. There are many such systems in place and they are generally named or described based on how the GNSS sensor receives the external information. Some systems transmit additional information about sources of error, others provide direct measurements of how much the signal was off in the past, while a third group provides additional vehicle information to be integrated in the calculation process.
Global Positioning System (GPS) satellites broadcast microwave signals to enable GPS receivers on or near the Earth's surface to determine location and time, and to derive velocity. The system is operated by the U.S. Department of Defense (DoD) for use by both the military and the general public.
Global Navigation Satellite System (GNSS) receivers, using the GPS, GLONASS, Galileo or BeiDou system, are used in many applications. The first systems were developed in the 20th century, mainly to help military personnel find their way, but location awareness soon found many civilian applications.
An indoor positioning system (IPS) is a network of devices used to locate people or objects where GPS and other satellite technologies lack precision or fail entirely, such as inside multistory buildings, airports, alleys, parking garages, and underground locations.
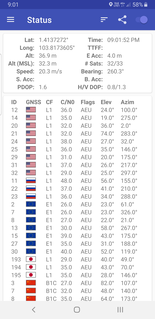
A satellite navigation device, colloquially called a GPS receiver, or simply a GPS, is a device that is capable of receiving information from GNSS satellites and then to calculate the device's geographical position. Using suitable software, the device may display the position on a map, and it may offer routing directions. The Global Positioning System (GPS) is one of a handful of global navigation satellite systems (GNSS) made up of a network of a minimum of 24, but currently 30, satellites placed into orbit by the U.S. Department of Defense.

The UNSW School of Surveying and Geospatial Engineering (SAGE), part of the UNSW Faculty of Engineering, was founded in 1970 and disestablished in 2013.
GNSS enhancement refers to techniques used to improve the accuracy of positioning information provided by the Global Positioning System or other global navigation satellite systems in general, a network of satellites used for navigation. Enhancement methods of improving accuracy rely on external information being integrated into the calculation process. There are many such systems in place and they are generally named or described based on how the GPS sensor receives the information. Some systems transmit additional information about sources of error, others provide direct measurements of how much the signal was off in the past, while a third group provide additional navigational or vehicle information to be integrated in the calculation process.
Virtual Reference Station (VRS) networks use real-time kinematic (RTK) solutions to provide high-accuracy, RTK Global Navigation Satellite Systems.
Precise Point Positioning (PPP) is a global navigation satellite system (GNSS) positioning method that calculates very precise positions, with errors as small as a few centimeters under good conditions. PPP is a combination of several relatively sophisticated GNSS position refinement techniques that can be used with near-consumer-grade hardware to yield near-survey-grade results. PPP uses a single GNSS receiver, unlike standard RTK methods, which use a temporarily fixed base receiver in the field as well as a relatively nearby mobile receiver. PPP methods overlap somewhat with DGNSS positioning methods, which use permanent reference stations to quantify systemic errors.
Locata Corporation is a privately held technology company headquartered in Canberra, Australia, with a fully owned subsidiary in Las Vegas, Nevada. Locata has invented a local positioning system that can either replace or augment Global Positioning System (GPS) signals when they are blocked, jammed or unreliable. Government, commercial and other organizations use Locata to determine accurate positioning as a local backup to GPS.
