
A machine is any physical system with ordered structural and functional properties. It may represent human-made or naturally occurring device molecular machine that uses power to apply forces and control movement to perform an action. Machines can be driven by animals and people, by natural forces such as wind and water, and by chemical, thermal, or electrical power, and include a system of mechanisms that shape the actuator input to achieve a specific application of output forces and movement. They can also include computers and sensors that monitor performance and plan movement, often called mechanical systems.

Dextre, also known as the Special Purpose Dexterous Manipulator (SPDM), is a two armed robot, or telemanipulator, which is part of the Mobile Servicing System on the International Space Station (ISS), and does repairs otherwise requiring spacewalks. It was launched March 11, 2008 on mission STS-123.
Domo is an experimental robot made by MIT designed to interact with humans. The brainchild of Jeff Weber and Aaron Edsinger, cofounders of Meka Robotics, its name comes from the Japanese phrase for "thank you very much", domo arigato, as well as the Styx song, "Mr. Roboto". The Domo project was originally funded by NASA, and has now been joined by Toyota in funding robot's development.
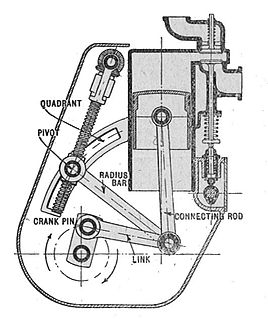
A mechanical linkage is an assembly of systems connected to manage forces and movement. The movement of a body, or link, is studied using geometry so the link is considered to be rigid. The connections between links are modeled as providing ideal movement, pure rotation or sliding for example, and are called joints. A linkage modeled as a network of rigid links and ideal joints is called a kinematic chain.

An articulated robot is a robot with rotary joints. Articulated robots can range from simple two-jointed structures to systems with 10 or more interacting joints and materials. They are powered by a variety of means, including electric motors.
A pneumatic gripper is a specific type of pneumatic actuator that typically involves either parallel or angular motion of surfaces, A.K.A. “tooling jaws or fingers” that will grip an object. When combined with other pneumatic, electric, or hydraulic components, the gripper can be used as part of a "pick and place" system that will allow a component to be picked up and placed elsewhere during the manufacturing process.
Vibration isolation is the process of isolating an object, such as a piece of equipment, from the source of vibrations.
Underactuation is a technical term used in robotics and control theory to describe mechanical systems that cannot be commanded to follow arbitrary trajectories in configuration space. This condition can occur for a number of reasons, the simplest of which is when the system has a lower number of actuators than degrees of freedom. In this case, the system is said to be trivially underactuated.

A ball balancing robot also known as a ballbot is a dynamically-stable mobile robot designed to balance on a single spherical wheel. Through its single contact point with the ground, a ballbot is omnidirectional and thus exceptionally agile, maneuverable and organic in motion compared to other ground vehicles. Its dynamic stability enables improved navigability in narrow, crowded and dynamic environments. The ballbot works on the same principle as that of an inverted pendulum.
Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.

A parallel manipulator is a mechanical system that uses several computer-controlled serial chains to support a single platform, or end-effector. Perhaps, the best known parallel manipulator is formed from six linear actuators that support a movable base for devices such as flight simulators. This device is called a Stewart platform or the Gough-Stewart platform in recognition of the engineers who first designed and used them.

A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The terminus of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. However, the term "robotic hand" as a synonym of the robotic arm is often proscribed.

In mechanical engineering, a compliant mechanism is a flexible mechanism that achieves force and motion transmission through elastic body deformation. It gains some or all of its motion from the relative flexibility of its members rather than from rigid-body joints alone. These may be monolithic (single-piece) or jointless structures. Some common devices that use compliant mechanisms are backpack latches and paper clips. One of the oldest examples of using compliant structures is the Bow and arrow.

Robotics is an interdisciplinary branch of computer science and engineering. Robotics involves design, construction, operation, and use of robots. The goal of robotics is to design machines that can help and assist humans. Robotics integrates fields of mechanical engineering, electrical engineering, information engineering, mechatronics, electronics, bioengineering, computer engineering, control engineering, software engineering, mathematics, etc.
Kanguera is a robot hand developed by the University of São Paulo. It runs the VxWorks operating system. The goal of this research project is to model the kinematic properties of a human hand so that better anthropomorphic robotic grippers or manipulators can be developed. The name, Kanguera, is an ancient indigenous word for "bones outside the body".

Bio-inspired robotic locomotion is a fairly new subcategory of bio-inspired design. It is about learning concepts from nature and applying them to the design of real-world engineered systems. More specifically, this field is about making robots that are inspired by biological systems. Biomimicry and bio-inspired design are sometimes confused. Biomimicry is copying from nature while bio-inspired design is learning from nature and making a mechanism that is simpler and more effective than the system observed in nature. Biomimicry has led to the development of a different branch of robotics called soft robotics. The biological systems have been optimized for specific tasks according to their habitat. However, they are multifunctional and are not designed for only one specific functionality. Bio-inspired robotics is about studying biological systems, and look for the mechanisms that may solve a problem in the engineering field. The designer should then try to simplify and enhance that mechanism for the specific task of interest. Bio-inspired roboticists are usually interested in biosensors, bioactuators, or biomaterials. Most of the robots have some type of locomotion system. Thus, in this article different modes of animal locomotion and few examples of the corresponding bio-inspired robots are introduced.
Soft robotics is a subfield of robotics that concerns the design, control, and fabrication of robots composed of compliant materials, instead of rigid links. In contrast to rigid-bodied robots built from metals, ceramics and hard plastics, the compliance of soft robots can improve their safety when working in close contact with humans.
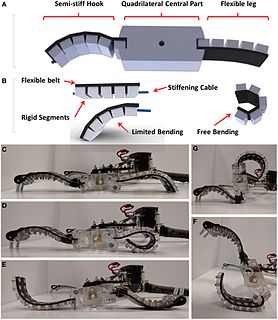
The term “soft robots” designs a broad class of robotic systems whose architecture includes soft elements, with much higher elasticity than traditional rigid robots. Articulated Soft Robots are robots with both soft and rigid parts, inspired to the muscle-skeletal system of vertebrate animals – from reptiles to birds to mammalians to humans. Compliance is typically concentrated in actuators, transmission and joints while structural stability is provided by rigid or semi-rigid links.
In robotics, Cartesian parallel manipulators are manipulators that move a platform using parallel-connected kinematic linkages (`limbs') lined up with a Cartesian coordinate system. Multiple limbs connect the moving platform to a base. Each limb is driven by a linear actuator and the linear actuators are mutually perpendicular. The term `parallel' here refers to the way that the kinematic linkages are put together, it does not connote geometrically parallel; i.e., equidistant lines.
Arachnid locomotion is the various means by which arachnids walk, run, or jump; they make use of more than muscle contraction, employing additional methods like hydraulic compression. Another adaptation seen especially in larger arachnid variants is inclusion of elastic connective tissues.


