
FlightGear Flight Simulator is a free, open source multi-platform flight simulator developed by the FlightGear project since 1997.

Crystal Space is an unmaintained framework for developing 3D applications written in C++ by Jorrit Tyberghein and others. The first public release was on August 26, 1997. It is typically used as a game engine but the framework is more general and can be used for any kind of 3D visualization. It is very portable and runs on Microsoft Windows, Linux, UNIX, and Mac OS X. It is also free and open-source software, licensed under the GNU LGPL-2.0-or-later, and was SourceForge.net's Project of the Month for February 2003. In 2019, one of the project's main developers described it as "effectively dead and has been for a good number of years".
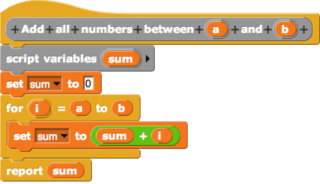
In computing, a visual programming language, also known as diagrammatic programming, graphical programming or block coding, is a programming language that lets users create programs by manipulating program elements graphically rather than by specifying them textually. A VPL allows programming with visual expressions, spatial arrangements of text and graphic symbols, used either as elements of syntax or secondary notation. For example, many VPLs are based on the idea of "boxes and arrows", where boxes or other screen objects are treated as entities, connected by arrows, lines or arcs which represent relations. VPLs are generally the basis of low-code development platforms.

Modelica is an object-oriented, declarative, multi-domain modeling language for component-oriented modeling of complex systems, e.g., systems containing mechanical, electrical, electronic, hydraulic, thermal, control, electric power or process-oriented subcomponents. The free Modelica language is developed by the non-profit Modelica Association. The Modelica Association also develops the free Modelica Standard Library that contains about 1400 generic model components and 1200 functions in various domains, as of version 4.0.0.
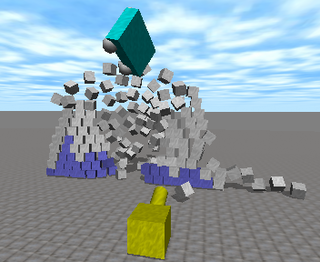
The Open Dynamics Engine (ODE) is a physics engine written in C/C++. Its two main components are a rigid body dynamics simulation engine and a collision detection engine. It is free software licensed both under the BSD license and the LGPL.

Delta3d is an open source software gaming/simulation engine API. Delta3d is managed and supported by Caper Holdings LLC. Previously the Modeling, Virtual Environments, and Simulation (MOVES) Institute at the Naval Postgraduate School in Monterey, California managed and supported delta3d. Alion Science has also been a major contributor to enhancements and features.

The RoboCup Simulation League is one of five soccer leagues within the RoboCup initiative.

Microsoft Robotics Developer Studio is a discontinued Windows-based environment for robot control and simulation that was aimed at academic, hobbyist, and commercial developers and handled a wide variety of robot hardware. It requires a Microsoft Windows 7 operating system or later.

The Player Project creates free and open-source software for research into robotics and sensor systems. Its components include the Player network server and the Stage platform robotics simulators. Although accurate statistics are hard to obtain, Player is one of the most popular open-source robot interfaces in research and post-secondary education.

Webots is a free and open-source 3D robot simulator used in industry, education and research.

A robotics simulator is a simulator used to create an application for a physical robot without depending on the physical machine, thus saving cost and time. In some case, such applications can be transferred onto a physical robot without modification.
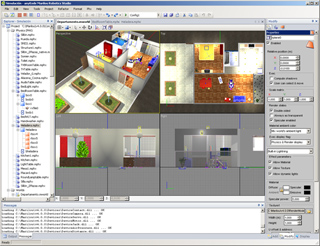
anyKode Marilou is a modeling and simulation environment for mobile robots, humanoids, articulated arms and parallel robots operating in real-world conditions that respect the laws of physics. This robotics suite is used in research centers and industry for various projects like humanoid architectures, wheeled and multi legged vehicles, and multi-robot systems (Multi-agents).
Web-based simulation (WBS) is the invocation of computer simulation services over the World Wide Web, specifically through a web browser. Increasingly, the web is being looked upon as an environment for providing modeling and simulation applications, and as such, is an emerging area of investigation within the simulation community.

MapleSim is a Modelica-based, multi-domain modeling and simulation tool developed by Maplesoft. MapleSim generates model equations, runs simulations, and performs analyses using the symbolic and numeric mathematical engine of Maple. Models are created by dragging-and-dropping components from a library into a central workspace, resulting in a model that represents the physical system in a graphical form. Maplesoft began development of MapleSim partly in response to a request from Toyota to produce physical modeling tools to aid in their new model-based development process.
Vortex Studio is a simulation software platform developed by CM Labs Simulations. It features a real-time physics engine that simulates rigid body dynamics, collision detection, contact determination, and dynamic reactions. It also contains model import and preparation tools, an image generator, and networking tools for distributed simulation which is accessed through a desktop editor via a GUI. Vortex adds accurate physical motion and interactions to objects in visual-simulation applications for operator training, mission planning, product concept validation, heavy machinery and robotics design and testing, haptics devices, immersive and virtual reality (VR) environments.

SimulationX is a CAE software application running on Microsoft Windows for the physical simulation of technical systems. It is developed and sold by ESI Group.

The RoboCup 3D Simulated Soccer League allows software agents to control humanoid robots to compete against one another in a realistic simulation of the rules and physics of a game of soccer. The platform strives to reproduce the software programming challenges faced when building real physical robots for this purpose. In doing so, it helps research towards the RoboCup Federation's goal of developing a team of fully autonomous humanoid robots that can win against the human world soccer champion team in 2050.
Project Chrono is a physics engine developed by University of Parma, University of Wisconsin-Madison and members of its open source community. It supports simulating rigid and soft body dynamics, collision detection, vehicle dynamics, fluid-solid interaction, deformable terrain, and granular dynamics, among other physical systems. The latest developments are in the area of sensor simulation, robotics simulation, human-autonomous agent interaction, and autonomous vehicle simulation, where the emphasis is on off-road scenarios. Parts of the code run on the GPU, multi-core CPUs, and distributed memory architectures via MPI. It is used at tens of universities, in industry, and federal research labs.
