A virtual private network (VPN) is a mechanism for creating a secure connection between a computing device and a computer network, or between two networks, using an insecure communication medium such as the public Internet.

Robotic spacecraft or uncrewed spacecraft are spacecraft without people on board. Uncrewed spacecraft may have varying levels of autonomy from human input; they may be remote controlled, remote guided or autonomous: they have a pre-programmed list of operations, which they will execute unless otherwise instructed. A robotic spacecraft for scientific measurements is often called a space probe or space observatory.

The University of Western Australia (UWA) is a public research university in the Australian state of Western Australia. The university's main campus is in Perth, the state capital. UWA was established in 1911 by an act of the Parliament of Western Australia.

Military robots are autonomous robots or remote-controlled mobile robots designed for military applications, from transport to search & rescue and attack.
Telepresence refers to a set of technologies which allow a person to feel as if they were present, to give the appearance or effect of being present via telerobotics, at a place other than their true location.

Telerobotics is the area of robotics concerned with the control of semi-autonomous robots from a distance, chiefly using television, wireless networks or tethered connections. It is a combination of two major subfields, which are teleoperation and telepresence.

James Sacra Albus was an American engineer, Senior NIST Fellow and founder and former chief of the Intelligent Systems Division of the Manufacturing Engineering Laboratory at the National Institute of Standards and Technology (NIST).
Remote surgery is the ability for a doctor to perform surgery on a patient even though they are not physically in the same location. It is a form of telepresence. A robot surgical system generally consists of one or more arms, a master controller (console), and a sensory system giving feedback to the user. Remote surgery combines elements of robotics, telecommunications such as high-speed data connections and elements of management information systems. While the field of robotic surgery is fairly well established, most of these robots are controlled by surgeons at the location of the surgery. Remote surgery is remote work for surgeons, where the physical distance between the surgeon and the patient is less relevant. It promises to allow the expertise of specialized surgeons to be available to patients worldwide, without the need for patients to travel beyond their local hospital.

Teleoperation indicates operation of a system or machine at a distance. It is similar in meaning to the phrase "remote control" but is usually encountered in research, academia and technology. It is most commonly associated with robotics and mobile robots but can be applied to a whole range of circumstances in which a device or machine is operated by a person from a distance.
Push technology or server push is a style of Internet-based communication where the request for a given transaction is initiated by the publisher or central server. It is contrasted with pull, or get, where the request for the transmission of information is initiated by the receiver or client.

Kenneth Yigael Goldberg is an American artist, writer, inventor, and researcher in the field of robotics and automation. He is professor and chair of the industrial engineering and operations research department at the University of California, Berkeley, and holds the William S. Floyd Jr. Distinguished Chair in Engineering at Berkeley, with joint appointments in Electrical Engineering and Computer Sciences (EECS), Art Practice, and the School of Information. Goldberg also holds an appointment in the Department of Radiation Oncology at the University of California, San Francisco.

A mobile robot is an automatic machine that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering.

A remote manipulator, also known as a telefactor, telemanipulator, or waldo, is a device which, through electronic, hydraulic, or mechanical linkages, allows a hand-like mechanism to be controlled by a human operator. The purpose of such a device is usually to move or manipulate hazardous materials for reasons of safety, similar to the operation and play of a claw crane game.

The TeleGarden was a telerobotic community garden for the Internet. Starting in the mid-1990s, it allowed users to view, plant and take care of a small garden, using an Adept-1 industrial robotic arm controlled online.
Cloud computing is the on-demand availability of computer system resources, especially data storage and computing power, without direct active management by the user. Large clouds often have functions distributed over multiple locations, each of which is a data center. Cloud computing relies on sharing of resources to achieve coherence and typically uses a pay-as-you-go model, which can help in reducing capital expenses but may also lead to unexpected operating expenses for users.
The Wayback Machine is a digital archive of the World Wide Web founded by the Internet Archive, a nonprofit based in San Francisco, California. Created in 1996 and launched to the public in 2001, it allows the user to go "back in time" to see how websites looked in the past. Its founders, Brewster Kahle and Bruce Gilliat, developed the Wayback Machine to provide "universal access to all knowledge" by preserving archived copies of defunct web pages.
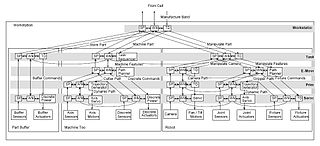
Real-time Control System (RCS) is a reference model architecture, suitable for many software-intensive, real-time computing control problem domains. It defines the types of functions needed in a real-time intelligent control system, and how these functions relate to each other.
Remote laboratory is the use of telecommunications to remotely conduct real experiments, at the physical location of the operating technology, whilst the scientist is utilizing technology from a separate geographical location. Remote laboratory comprehends one or more remote experiments.

Craig Anthony McKinley was a Canadian physician. On February 28, 2003, McKinley participated in the world's first telerobotic-assisted surgery, conducted at two hospitals separated by 400 kilometres. He later served as an aquanaut on the joint NASA-NOAA NEEMO 7 underwater exploration mission in October 2004, where he and other aquanauts tested remote health care procedures with potential application for space travel. McKinley experienced problems with alcohol and faced legal difficulties beginning in 2009. He lost his hospital privileges in 2011 and died in 2013.
SCADA Strangelove is an independent group of information security researchers founded in 2012, focused on security assessment of industrial control systems (ICS) and SCADA.